Method 2G - Determination of Stack Gas Velocity and Volumetric Flow Rate With Two-Dimensional Probes
Note: This method does not include all of the
specifications (e.g., equipment and supplies) and procedures (e.g., sampling)
essential to its performance. Some material has been incorporated from other
methods in this part. Therefore, to obtain reliable results, those using this
method should have a thorough knowledge of at least the following additional
test methods: Methods 1, 2,
3 or 3A, and 4.
3.1. Angle-measuring
Device Rotational Offset (RADO).
3.4 Full Scale of
Pressure-measuring Device.
3.6 ‘‘May,’’ ‘‘Must,’’
‘‘Shall,’’ ‘‘Should,’’ and the imperative form of verbs for method provisions
3.15 Reference Scribe
Line Rotational Offset (RSLO).
3.18 Three-dimensional
(3-D) Probe.
3.19 Two-dimensional
(2-D) Probe.
3.21 Wind Tunnel
Calibration Location.
3.22 Wind Tunnel with
Documented Axial Flow.
6.1.1 Type S
(Stausscheibe or reverse type) pitot tube.
6.1.2 Three-dimensional
probes used in 2-D mode.
6.1.3 Other probes.
[Reserved]
6.1.6 Probe and system
characteristics to ensure horizontal stability.
6.2 Yaw Angle-measuring
Device.
6.2.2 Protractor wheel
and pointer assembly.
6.2.3 Other yaw
angle-measuring devices.
6.3 Probe Supports and
Stabilization Devices.
6.4 Differential
Pressure Gauges.
6.4.1 Differential
pressure-measuring device.
6.4.2 Gauge used for
yaw nulling.
6.4.3 Devices for
calibrating differential pressure-measuring devices.
6.4.4 Devices used for
post-test calibration check.
6.5 Data Display and
Capture Devices.
6.7 Stack or Duct
Static Pressure Measurement.
6.8 Barometer. Same as
Method 2, section 2.5.
6.9 Gas Density
Determination Equipment.
6.11 Wind Tunnel for
Probe Calibration.
6.11.1 Test section
cross-sectional area.
6.11.2 Velocity range
and stability.
6.11.3 Flow profile at
the calibration location.
6.11.4 Entry ports in
the wind tunnel test section.
7.0 Reagents and
Standards. [Reserved]
8.0 Sample Collection
and Analysis
8.1 Equipment
Inspection and Set Up
8.2 Horizontal
Straightness Check.
8.3 Rotational Position
Check.
8.3.1 Angle-measuring
device rotational offset.
8.3.2 Sign of
angle-measuring device rotational offset.
8.3.3 Angle-measuring
devices that can be independently adjusted
8.5 Zeroing the
Differential Pressure-measuring Device.
8.6 Traverse Point
Verification.
8.9.1 Yaw angle
measurement protocol.
8.9.4 Yaw angle
determination.
8.9.5 Impact velocity
determination.
8.15 Data Recording and
Calculations.
9.1 Quality Control
Activities.
9.1.1 Range of the
differential pressure gauge.
9.1.2 Horizontal
stability check.
10.1 Wind Tunnel
Qualification Checks.
10.1.1 Velocity
pressure cross-check.
10.1.2 Axial flow
verification.
10.3 Pre-Calibration
Procedures.
10.4 Placement of
Reference Scribe Line.
10.5 Yaw Angle
Calibration Procedure.
10.6 Velocity
Calibration Procedure.
10.8 Calibration of
pressure-measuring devices used in the field.
10.8.1 Post-test
calibration check.
12.0 Data Analysis and
Calculations
12.2 Traverse Point
Velocity Calculations.
12.2.1 Selection of
calibration coefficient.
12.2.2 Near-axial
traverse point velocity.
12.2.3 Handling
multiple measurements at a traverse point.
12.3 Average Near-Axial
Velocity in Stack or Duct.
12.4 Acceptability of
Results.
12.5 Average Gas
Volumetric Flow Rate in Stack or Duct (Wet Basis).
12.6 Average Gas
Volumetric Flow Rate in Stack or Duct (Dry Basis).
13.0 Method
Performance. [Reserved]
14.0 Pollution
Prevention. [Reserved]
15.0 Waste Management.
[Reserved]
16.1.1 Description of
the source.
18.1 Annex A -
Rotational Position Check.
18.1.1 Rotational
position check with probe outside stack.
18.1.2 Rotational
position check with probe in stack.
18.2 Annex B - Angle
Measurement Protocol for Protractor Wheel and Pointer Device.
18.3 Annex C -
Guideline for Reference Scribe Line Placement.
18.4 Annex D -
Determination of Reference Scribe Line Rotational Offset.
1.0 Scope and Application
1.1 This
method is applicable for the determination of yaw angle, near-axial velocity,
and the volumetric flow rate of a gas stream in a stack or duct using a
two-dimensional (2-D) probe.
2.0 Summary of Method
2.1 A 2–D
probe is used to measure the velocity pressure and the yaw angle of the flow velocity
vector in a stack or duct.
Alternatively, these measurements may be made by operating one of the
three-dimensional (3-D) probes described in Method 2F,
in yaw determination mode only. From these measurements and a determination of
the stack gas density, the average near-axial velocity of the stack gas is
calculated. The near-axial velocity accounts for the yaw, but not the pitch,
component of flow. The average gas volumetric flow rate in the stack or duct is
then determined from the average near-axial velocity.
3.0 Definitions
3.1. Angle-measuring Device Rotational Offset (RADO).
The rotational
position of an angle-measuring device relative to the reference scribe line, as
determined during the pre-test rotational position check described in section 8.3.
3.2 Calibration Pitot Tube.
The standard (Prandtl type) pitot tube used as a reference
when calibrating a probe under this method.
3.3 Field Test.
A set of measurements conducted at a specific unit or
exhaust stack/ duct to satisfy the applicable regulation (e.g., a three-run
boiler performance test, a single or multiple-load nine-run relative accuracy
test).
3.4 Full Scale of Pressure-measuring Device.
Full scale
refers to the upper limit of the measurement range displayed by the device. For
bi-directional pressure gauges, full scale includes the entire pressure range
from the lowest negative value to the highest positive value on the pressure
scale.
3.5 Main probe.
Refers to the
probe head and that section of probe sheath directly attached to the probe
head. The main probe sheath is distinguished from probe extensions, which are
sections of sheath added onto the main probe to extend its reach.
3.6 ‘‘May,’’ ‘‘Must,’’ ‘‘Shall,’’
‘‘Should,’’ and the imperative form of verbs for method provisions
3.6.1 ‘‘May’’
is used to indicate that
a provision of this method is optional.
3.6.2 ‘‘Must,’’
‘‘Shall,’’ and the
imperative form of verbs (such as ‘‘record’’ or ‘‘enter’’) are used to indicate
that a provision of this method is mandatory.
3.6.3 ‘‘Should’’
is used to indicate that
a provision of this method is not mandatory, but is highly recommended as good
practice.
3.7 Method 1.
Refers to 40 CFR part 60, appendix A, ‘‘Method 1 - Sample
and velocity traverses for stationary sources.’’
3.8 Method 2.
Refers to 40 CFR part 60, appendix A, ‘‘Method 2 -
Determination of stack gas velocity and volumetric flow rate (Type S pitot
tube).’’
3.9 Method 2F.
Refers to 40
CFR part 60, appendix A, ‘‘Method 2F - Determination of stack gas velocity and
volumetric flow rate with three-dimensional probes.’’
3.10 Near-axial Velocity.
The velocity
vector parallel to the axis of the stack or duct that accounts for the yaw
angle component of gas flow. The term ‘‘near-axial’’ is used herein to indicate
that the velocity and volumetric flow rate results account for the measured yaw
angle component of flow at each measurement point.
3.11 Nominal Velocity.
Refers to a wind tunnel velocity setting that approximates
the actual wind tunnel velocity to within ±1.5 m/ sec (±5 ft/sec).
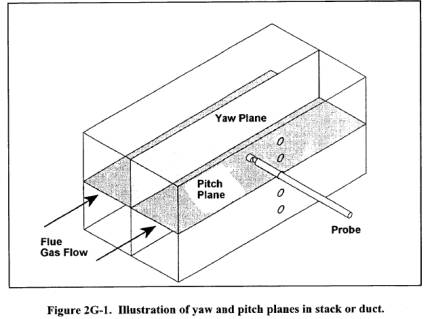
3.12 Pitch Angle.
The angle
between the axis of the stack or duct and the pitch component of flow, i.e.,
the component of the total velocity vector in a plane defined by the traverse
line and the axis of the stack or duct. (Figure 2G-1
illustrates the ‘‘pitch plane.’’) From the standpoint of a tester facing a test
port in a vertical stack, the pitch component of flow is the vector of flow
moving from the center of the stack toward or away from that test port. The
pitch angle is the angle described by this pitch component of flow and the
vertical axis of the stack.
3.13 Readability.
For the purposes of this method, readability for an analog
measurement device is one half of the smallest scale division. For a digital
measurement device, it is the number of decimals displayed by the device.
3.14 Reference Scribe Line.
A line permanently inscribed on the main probe sheath (in
accordance with section 6.1.5.1) to serve as a
reference mark for determining yaw angles.
3.15 Reference Scribe Line Rotational Offset (RSLO).
The rotational
position of a probe’s reference scribe line relative to the probe’s yaw-null
position, as determined during the yaw angle calibration described in section 10.5.
3.16 Response Time.
The time
required for the measurement system to fully respond to a change from zero
differential pressure and ambient temperature to the stable stack or duct
pressure and temperature readings at a traverse point.
3.17 Tested Probe.
A probe that is being calibrated.
3.18 Three-dimensional (3-D) Probe.
A directional probe used to determine the velocity pressure
and the yaw and pitch angles in a flowing gas stream.
3.19 Two-dimensional (2-D) Probe.
A directional
probe used to measure velocity pressure and yaw angle in a flowing gas stream.
3.20 Traverse Line.
A diameter or axis extending across a stack or duct on which
measurements of velocity pressure and flow angles are made.
3.21 Wind Tunnel Calibration Location.
A point, line, area, or volume within the wind tunnel test
section at, along, or within which probes are calibrated. At a particular wind
tunnel velocity setting, the average velocity pressures at specified points at,
along, or within the calibration location shall vary by no more than 2 percent
or 0.3 mm H20 (0.01 in. H2O), whichever is less restrictive, from the average
velocity pressure at the calibration pitot tube location. Airflow at this
location shall be axial, i.e., yaw and pitch angles within ±3 of 0. Compliance
with these flow criteria shall be demonstrated by performing the procedures
prescribed in sections 10.1.1 and 10.1.2. For
circular tunnels, no part of the calibration location may be closer to the
tunnel wall than 10.2 cm (4 in.) or 25 percent of the tunnel diameter,
whichever is farther from the wall. For elliptical or rectangular tunnels, no
part of the calibration location may be closer to the tunnel wall than 10.2 cm
(4 in.) or 25 percent of the applicable cross-sectional axis, whichever is
farther from the wall.
3.22 Wind Tunnel with Documented Axial Flow.
A wind tunnel
facility documented as meeting the provisions of sections 10.1.1 (velocity
pressure crosscheck) and 10.1.2 (axial flow verification) using the procedures
described in these sections or alternative procedures determined to be
technically equivalent.
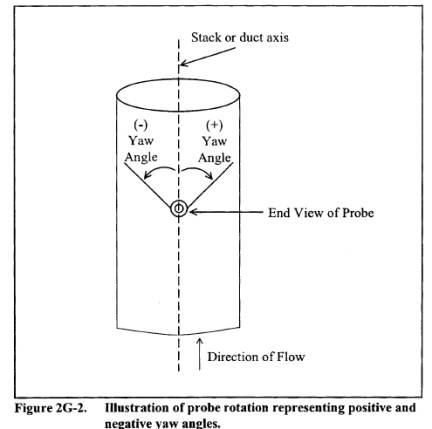
3.23 Yaw Angle.
The angle
between the axis of the stack or duct and the yaw component of flow, i.e., the
component of the total velocity vector in a plane perpendicular to the traverse
line at a particular traverse point. (Figure 2G-1 illustrates the ‘‘yaw
plane.’’) From the standpoint of a tester facing a test port in a vertical
stack, the yaw component of flow is the vector of flow moving to the left or
right from the center of the stack as viewed by the tester. (This is sometimes
referred to as ‘‘vortex flow,’’ i.e., flow around the centerline of a stack or
duct.) The yaw angle is the angle described by this yaw component of flow and
the vertical axis of the stack. The algebraic sign convention is illustrated in
Figure 2G-2.
3.24 Yaw Nulling.
A procedure in
which a Type-S pitot tube or a 3-D probe is rotated about its axis in a stack
or duct until a zero differential pressure reading (‘‘yaw null’’) is obtained.
When a Type S probe is yaw-nulled, the rotational position of its impact port
is 90° from the direction of flow in the stack or duct and the Delta P reading
is zero. When a 3-D probe is yaw-nulled, its impact pressure port (P1) faces
directly into the direction of flow in the stack or duct and the differential
pressure between pressure ports P2 and P3 is zero.
4.0 Interferences. [Reserved]
5.0 Safety
5.1 This test
method may involve hazardous operations and the use of hazardous materials or
equipment. This method does not purport to address all of the safety problems
associated with its use. It is the responsibility of the user to establish and
implement appropriate safety and health practices and to determine the
applicability of regulatory limitations before using this test method.
6.0 Equipment and Supplies
6.1 Two-dimensional Probes.
Probes that
provide both the velocity pressure and the yaw angle of the flow vector in a
stack or duct, as listed in sections 6.1.1 and 6.1.2, qualify for use based on
comprehensive wind tunnel and field studies involving both inter- and
intra-probe comparisons by multiple test teams. Each 2-D probe shall have a
unique identification number or code permanently marked on the main probe
sheath. Each probe shall be calibrated prior to use according to the procedures
in section 10. Manufacturer-supplied calibration data shall be used as example
information only, except when the manufacturer calibrates the probe as
specified in section 10 and provides complete documentation.
6.1.1 Type S (Stausscheibe or reverse type) pitot tube.
This is the
same as specified in Method 2, section 2.1, except for the following additional
specifications that enable the pitot tube to accurately determine the yaw
component of flow. For the purposes of this method, the external diameter of
the tubing used to construct the Type S pitot tube (dimension Dt in Figure 2-2 of Method 2) shall be no less than
9.5 mm (3/8 in.). The pitot tube shall also meet the following alignment
specifications. The angles a1, a2, b1, and b2, as shown in Method 2, Figure 2-3, shall not exceed ±2°. The
dimensions w and z, shown in Method 2, Figure 2-3 shall not
exceed 0.5 mm (0.02 in.).
6.1.1.1 Manual
Type S probe.
This refers to
a Type S probe that is positioned at individual traverse points and yaw-nulled
manually by an operator.
6.1.1.2
Automated Type S probe. This refers to a system that uses a computer-controlled
motorized mechanism to position the Type S pitot head at individual traverse
points and perform yaw angle determinations.
6.1.2 Three-dimensional probes used in 2-D mode.
A 3-D probe,
as specified in sections 6.1.1 through
6.1.3 of Method 2F, may, for the purposes of this method, be used in a
two-dimensional mode (i.e., measuring yaw angle, but not pitch angle). When the
3-D probe is used as a 2-D probe, only the velocity pressure and yaw-null
pressure are obtained using the pressure taps referred to as P1, P2, and P3.
The differential pressure P1-P2 is a function of total velocity and corresponds
to the Delta P obtained using the Type S probe. The differential pressure P2-P3
is used to yaw-null the probe and determine the yaw angle. The differential
pressure P4-P5, which is a function of pitch angle, is not measured when the
3-D probe is used in 2-D mode.
6.1.3 Other probes. [Reserved]
6.1.4 Probe sheath.
The probe
shaft shall include an outer sheath to: (1) provide a surface for inscribing a
permanent reference scribe line, (2) accommodate attachment of an
angle-measuring device to the probe shaft, and (3) facilitate precise
rotational movement of the probe for determining yaw angles. The sheath shall
be rigidly attached to the probe assembly and shall enclose all pressure lines
from the probe head to the farthest position away from the probe head where an
angle-measuring device may be attached during use in the field. The sheath of
the fully assembled probe shall be sufficiently rigid and straight at all
rotational positions such that, when one end of the probe shaft is held in a
horizontal position, the fully extended probe meets the horizontal straightness
specifications indicated in section 8.2 below.
6.1.5 Scribe lines.
6.1.5.1
Reference scribe line. A permanent line, no greater than 1.6 mm (1/16 in.) in
width, shall be inscribed on each manual probe that will be used to determine yaw
angles of flow. This line shall be placed on the main probe sheath in
accordance with the procedures described in section 10.4 and is used as a
reference position for installation of the yaw angle-measuring device on the
probe. At the discretion of the tester, the scribe line may be a single line
segment placed at a particular position on the probe sheath (e.g., near the
probe head), multiple line segments placed at various locations along the
length of the probe sheath (e.g., at every position where a yaw angle-measuring
device may be mounted), or a single continuous line extending along the full
length of the probe sheath.
6.1.5.2 Scribe
line on probe extensions. A permanent line may also be inscribed on any probe
extension that will be attached to the main probe in performing field testing.
This allows a yaw angle-measuring device mounted on the extension to be readily
aligned with the reference scribe line on the main probe sheath.
6.1.5.3
Alignment specifications. This specification shall be met separately, using the
procedures in section 10.4.1, on the main probe and
on each probe extension. The rotational position of the scribe line or scribe
line segments on the main probe or any probe extension must not vary by more
than 2°. That is, the difference between the minimum and maximum of all of the
rotational angles that are measured along the full length of the main probe or
the probe extension must not exceed 2°.
6.1.6 Probe and system characteristics to ensure horizontal stability.
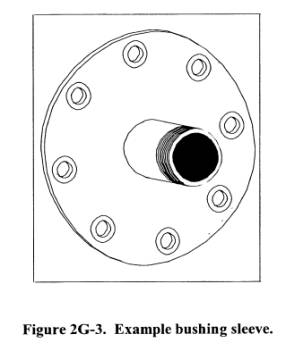
6.1.6.1 For
manual probes, it is recommended that the effective length of the probe
(coupled with a probe extension, if necessary) be at least 0.9 m (3 ft.) longer
than the farthest traverse point mark on the probe shaft away from the probe
head. The operator should maintain the probe’s horizontal stability when it is
fully inserted into the stack or duct. If a shorter probe is used, the probe
should be inserted through a bushing sleeve, similar to the one shown in Figure 2G-3, that is installed on the test port; such a
bushing shall fit snugly around the probe and be secured to the stack or duct
entry port in such a manner as to maintain the probe’s horizontal stability
when fully inserted into the stack or duct.
6.1.6.2 An
automated system that includes an external probe casing with a transport system
shall have a mechanism for maintaining horizontal stability comparable to that
obtained by manual probes following the provisions of this method. The automated
probe assembly shall also be constructed to maintain the alignment and position
of the pressure ports during sampling at each traverse point. The design of the
probe casing and transport system shall allow the probe to be removed from the
stack or duct and checked through direct physical measurement for angular
position and insertion depth.
6.1.7 Tube Connect Diameter
The tubing
that is used to connect the probe and the pressure-measuring device should have
an inside diameter of at least 3.2 mm (1⁄8 in.), to reduce the time required
for pressure equilibration, and should be as short as practicable.
6.1.8 Detachable Probe Head
If a
detachable probe head without a sheath [e.g., a pitot tube, typically 15.2 to
30.5 cm (6 to 12 in.) in length] is coupled with a probe sheath and calibrated
in a wind tunnel in accordance with the yaw angle calibration procedure in section 10.5, the probe head shall remain
attached to the probe sheath during field testing in the same configuration and
orientation as calibrated. Once the detachable probe head is uncoupled or
re-oriented, the yaw angle calibration of the probe is no longer valid and must
be repeated before using the probe in subsequent field tests.
6.2 Yaw Angle-measuring Device.
One of the
following devices shall be used for measurement of the yaw angle of flow.
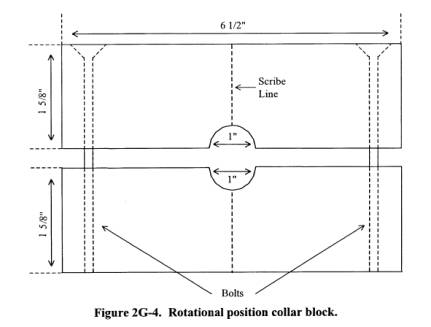
6.2.1 Digital inclinometer.
This refers to
a digital device capable of measuring and displaying the rotational position of
the probe to within ±1°. The device shall be able to be locked into position on
the probe sheath or probe extension, so that it indicates the probe’s
rotational position throughout the test. A rotational position collar block
that can be attached to the probe sheath (similar to the collar shown in Figure 2G-4) may be required to lock the digital
inclinometer into position on the probe sheath.
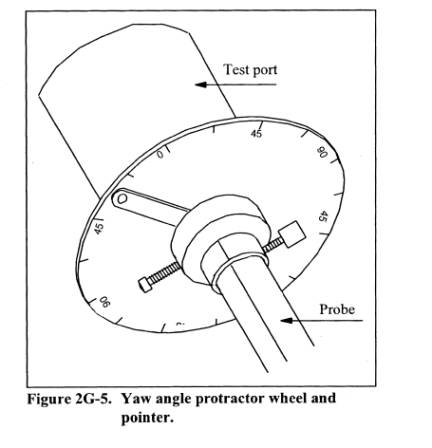
6.2.2 Protractor wheel and pointer assembly.
This
apparatus, similar to that shown in Figure 2G-5,
consists of the following components.
6.2.2.1 A
protractor wheel that can be attached to a port opening and set in a fixed
rotational position to indicate the yaw angle position of the probe’s scribe
line relative to the longitudinal axis of the stack or duct. The protractor
wheel must have a measurement ring on its face that is no less than 17.8 cm (7
in.) in diameter, shall be able to be rotated to any angle and then locked into
position on the stack or duct test port, and shall indicate angles to a resolution
of 1°.
6.2.2.2 A
pointer assembly that includes an indicator needle mounted on a collar that can
slide over the probe sheath and be locked into a fixed rotational position on
the probe sheath. The pointer needle shall be of sufficient length, rigidity,
and sharpness to allow the tester to determine the probe’s angular position to
within 1° from the markings on the protractor wheel. Corresponding to the
position of the pointer, the collar must have a scribe line to be used in
aligning the pointer with the scribe line on the probe sheath.
6.2.3 Other yaw angle-measuring devices.
Other
angle-measuring devices with a manufacturer’s specified precision of 1° or
better may be used, if approved by the Administrator.
6.3 Probe Supports and Stabilization Devices.
When probes
are used for determining flow angles, the probe head should be kept in a stable
horizontal position. For probes longer than 3.0 m (10 ft.), the section of the
probe that extends outside the test port shall be secured. Three alternative
devices are suggested for maintaining the horizontal position and stability of
the probe shaft during flow angle determinations and velocity pressure
measurements: (1) monorails installed above each port, (2) probe stands on which
the probe shaft may be rested, or (3) bushing sleeves of sufficient length
secured to the test ports to maintain probes in a horizontal position.
Comparable provisions shall be made to ensure that automated systems maintain
the horizontal position of the probe in the stack or duct. The physical
characteristics of each test platform may dictate the most suitable type of
stabilization device. Thus, the choice of a specific stabilization device is
left to the judgment of the testers.
6.4 Differential Pressure Gauges.
The velocity
pressure (Delta P) measuring devices used during wind tunnel calibrations and
field testing shall be either electronic manometers (e.g., pressure
transducers), fluid manometers, or mechanical pressure gauges (e.g.,
Magnehelic® gauges). Use of electronic manometers is recommended. Under low
velocity conditions, use of electronic manometers may be necessary to obtain
acceptable measurements.
6.4.1 Differential pressure-measuring device.
This refers to
a device capable of measuring pressure differentials and having a readability
of ±1 percent of full scale. The device shall be capable of accurately
measuring the maximum expected pressure differential. Such devices are used to
determine the following pressure measurements: velocity pressure, static
pressure, and yaw-null pressure. For an inclined-vertical manometer, the
readability specification of ±1 percent shall be met separately using the
respective full-scale upper limits of the inclined and vertical portions of the
scales. To the extent practicable, the device shall be selected such that most
of the pressure readings are between 10 and 90 percent of the device’s
full-scale measurement range (as defined in section 3.4). In addition,
pressure-measuring devices should be selected such that the zero does not drift
by more than 5 percent of the average expected pressure readings to be
encountered during the field test. This is particularly important under low
pressure conditions.
6.4.2 Gauge used for yaw nulling.
The
differential pressure-measuring device chosen for yaw nulling the probe during
the wind tunnel calibrations and field testing shall be bi-directional, i.e.,
capable of reading both positive and negative differential pressures. If a
mechanical, bi-directional pressure gauge is chosen, it shall have a full-scale
range no greater than 2.6 cm (i.e., -1.3 to +1.3 cm) [1 in. H2O (i.e., -0.5 in.
to +0.5 in.)].
6.4.3 Devices for calibrating differential pressure-measuring devices.
A precision
manometer (e.g., a U-tube, inclined, or inclined-vertical manometer, or
micromanometer) or NIST (National Institute of Standards and Technology)
traceable pressure source shall be used for calibrating differential
pressure-measuring devices. The device shall be maintained under laboratory
conditions or in a similar protected environment (e.g., a climate-controlled
trailer). It shall not be used in field tests. The precision manometer shall
have a scale gradation of 0.3 mm H2O (0.01 in. H2O), or less, in the range of 0
to 5.1 cm H2O (0 to 2 in. H2O) and 2.5 mm H2O (0.1 in. H2O), or less, in the
range of 5.1 to 25.4 cm H2O (2 to 10 in. H2O). The manometer shall have
manufacturer’s documentation that it meets an accuracy specification of at
least 0.5 percent of full scale. The NIST-traceable pressure source shall be
recertified annually.
6.4.4 Devices used for post-test calibration check.
A precision
manometer meeting the specifications in section 6.4.3, a pressure-measuring
device or pressure source with a documented calibration traceable to NIST, or
an equivalent device approved by the Administrator shall be used for the
post-test calibration check. The pressure-measuring device shall have a
readability equivalent to or greater than the tested device. The pressure
source shall be capable of generating pressures between 50 and 90 percent of
the range of the tested device and known to within ±1 percent of the full scale
of the tested device. The pressure source shall be recertified annually.
6.5 Data Display and Capture Devices.
Electronic
manometers (if used) shall be coupled with a data display device (such as a
digital panel meter, personal computer display, or strip chart) that allows the
tester to observe and validate the pressure measurements taken during testing.
They shall also be connected to a data recorder (such as a data logger or a
personal computer with data capture software) that has the ability to compute
and retain the appropriate average value at each traverse point, identified by
collection time and traverse point.
6.6 Temperature Gauges.
For field
tests, a thermocouple or resistance temperature detector (RTD) capable of
measuring temperature to within ±3°C (±5°F) of the stack or duct temperature
shall be used. The thermocouple shall be attached to the probe such that the
sensor tip does not touch any metal. The position of the thermocouple relative
to the pressure port face openings shall be in the same configuration as used
for the probe calibrations in the wind tunnel. Temperature gauges used for wind
tunnel calibrations shall be capable of measuring temperature to within ±0.6°C
(±1°F) of the temperature of the flowing gas stream in the wind tunnel.
6.7 Stack or Duct Static Pressure Measurement.
The
pressure-measuring device used with the probe shall be as specified in section
6.4 of this method. The static tap of a standard (Prandtl type) pitot tube or
one leg of a Type S pitot tube with the face opening planes positioned parallel
to the gas flow may be used for this measurement. Also acceptable is the
pressure differential reading of P1-Pbar from a five-hole prism-shaped 3-D
probe, as specified in section 6.1.1 of Method 2F (such as the Type DA or DAT
probe), with the P1 pressure port face opening positioned parallel to the gas
flow in the same manner as the Type S probe. However, the 3-D spherical probe,
as specified in section 6.1.2 of Method 2F, is unable to provide this
measurement and shall not be used to take static pressure measurements. Static
pressure measurement is further described in section 8.11.
6.8 Barometer. Same as Method 2, section 2.5.
6.9 Gas Density Determination Equipment.
Method 3 or 3A shall be used to determine the dry molecular weight of the stack or duct gas.
Method 4 shall be used for moisture content determination and computation of
stack or duct gas wet molecular weight. Other methods may be used, if approved
by the Administrator.
6.10 Calibration Pitot Tube.
Same as Method
2, section 2.7.
6.11 Wind Tunnel for Probe Calibration.
Wind tunnels
used to calibrate velocity probes must meet the following design
specifications.
6.11.1 Test section cross-sectional area.
The flowing
gas stream shall be confined within a circular, rectangular, or elliptical
duct. The cross-sectional area of the tunnel must be large enough to ensure
fully developed flow in the presence of both the calibration pitot tube and the
tested probe. The calibration site, or ‘‘test section,’’ of the wind tunnel
shall have a minimum diameter of 30.5 cm (12 in.) for circular or elliptical
duct cross-sections or a minimum width of 30.5 cm (12 in.) on the shorter side
for rectangular cross-sections. Wind tunnels shall meet the probe blockage
provisions of this section and the qualification requirements prescribed in
section 10.1. The projected area of the portion of the probe head, shaft, and attached
devices inside the wind tunnel during calibration shall represent no more than
4 percent of the cross-sectional area of the tunnel. The projected area shall
include the combined area of the calibration pitot tube and the tested probe if
both probes are placed simultaneously in the same cross-sectional plane in the
wind tunnel, or the larger projected area of the two probes if they are placed
alternately in the wind tunnel.
6.11.2 Velocity range and stability.
The wind
tunnel should be capable of maintaining velocities between 6.1 m/sec and 30.5
m/sec (20 ft/sec and 100 ft/sec). The wind tunnel shall produce fully developed
flow patterns that are stable and parallel to the axis of the duct in the test
section.
6.11.3 Flow profile at the calibration location.
The wind
tunnel shall provide axial flow within the test section calibration location
(as defined in section 3.21). Yaw and pitch angles in the calibration location
shall be within ±3° of 0°. The procedure for determining that this requirement
has been met is described in section 10.1.2.
6.11.4 Entry ports in the wind tunnel test section.
6.11.4.1 Port
for tested probe. A port shall be constructed for the tested probe. This port
shall be located to allow the head of the tested probe to be positioned within
the wind tunnel calibration location (as defined in section 3.21). The tested
probe shall be able to be locked into the 0° pitch angle position. To
facilitate alignment of the probe during calibration, the test section should
include a window constructed of a transparent material to allow the tested
probe to be viewed.
6.11.4.2 Port
for verification of axial flow. Depending on the equipment selected to conduct
the axial flow verification prescribed in section 10.1.2, a second port,
located 90° from the entry port for the tested probe, may be needed to allow
verification that the gas flow is parallel to the central axis of the test
section. This port should be located and constructed so as to allow one of the
probes described in section 10.1.2.2 to access the same test point(s) that are
accessible from the port described in section 6.11.4.1.
6.11.4.3 Port
for calibration pitot tube. The calibration pitot tube shall be used in the
port for the tested probe or in a separate entry port. In either case, all
measurements with the calibration pitot tube shall be made at the same point
within the wind tunnel over the course of a probe calibration. The measurement
point for the calibration pitot tube shall meet the same specifications for
distance from the wall and for axial flow as described in section 3.21 for the
wind tunnel calibration location.
7.0 Reagents and Standards. [Reserved]
8.0 Sample Collection and Analysis
8.1 Equipment Inspection and Set Up
8.1.1 All 2-D
and 3-D probes, differential pressure-measuring devices, yaw angle measuring
devices, thermocouples, and barometers shall have a current, valid calibration
before being used in a field test. (See sections 10.3.3, 10.3.4, and 10.5
through 10.10 for the applicable calibration requirements.)
8.1.2 Before
each field use of a Type S probe, perform a visual inspection to verify the
physical condition of the pitot tube. Record the results of the inspection. If
the face openings are noticeably misaligned or there is visible damage to the
face openings, the probe shall not be used until repaired, the dimensional
specifications verified (according to the procedures in section 10.2.1), and
the probe recalibrated.
8.1.3 Before
each field use of a 3-D probe, perform a visual inspection to verify the
physical condition of the probe head according to the procedures in section
10.2 of Method 2F. Record the inspection results on a form similar to Table 2F-1 presented in Method 2F. If there is
visible damage to the 3-D probe, the probe shall not be used until it is
recalibrated.
8.1.4 After
verifying that the physical condition of the probe head is acceptable, set up
the apparatus using lengths of flexible tubing that are as short as
practicable. Surge tanks installed between the probe and pressure-measuring
device may be used to dampen pressure fluctuations provided that an adequate
measurement system response time (see section 8.8) is maintained.
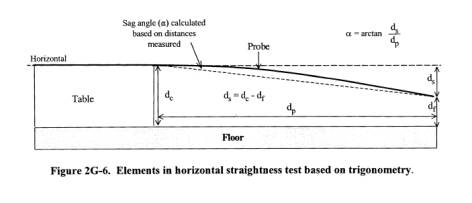
8.2 Horizontal Straightness Check.
A horizontal
straightness check shall be performed before the start of each field test,
except as otherwise specified in this section. Secure the fully assembled probe
(including the probe head and all probe shaft extensions) in a horizontal
position using a stationary support at a point along the probe shaft
approximating the location of the stack or duct entry port when the probe is
sampling at the farthest traverse point from the stack or duct wall. The probe
shall be rotated to detect bends. Use an angle-measuring device or trigonometry
to determine the bend or sag between the probe head and the secured end. (See Figure 2G-6.) Probes that are bent or sag by more than 5°
shall not be used. Although this check does not apply when the probe is used
for a vertical traverse, care should be taken to avoid the use of bent probes
when conducting vertical traverses. If the probe is constructed of a rigid
steel material and consists of a main probe without probe extensions, this
check need only be performed before the initial field use of the probe, when
the probe is recalibrated, when a change is made to the design or material of
the probe assembly, and when the probe becomes bent. With such probes, a visual
inspection shall be made of the fully assembled probe before each field test to
determine if a bend is visible. The probe shall be rotated to detect bends. The
inspection results shall be documented in the field test report. If a bend in
the probe is visible, the horizontal straightness check shall be performed
before the probe is used.
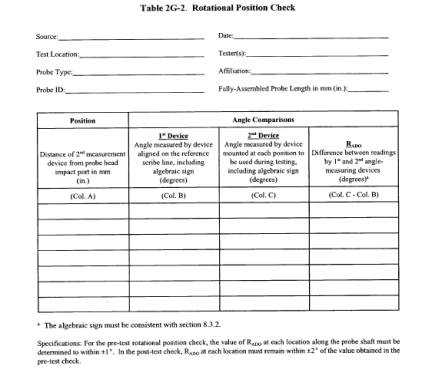
8.3 Rotational Position Check.
Before each
field test, and each time an extension is added to the probe during a field
test, a rotational position check shall be performed on all manually operated
probes (except as noted in section 8.3.5 below) to ensure that, throughout
testing, the angle-measuring device is either: aligned to within ±1° of the rotational
position of the reference scribe line; or is affixed to the probe such that the
rotational offset of the device from the reference scribe line is known to
within ±1°. This check shall consist of direct measurements of the rotational
positions of the reference scribe line and angle-measuring device sufficient to
verify that these specifications are met. Annex A in
section 18 of this method gives recommended procedures for performing the
rotational position check, and Table 2G-2 gives an
example data form. Procedures other than those recommended in Annex A in
section 18 may be used, provided they demonstrate whether the alignment
specification is met and are explained in detail in the field test report.
8.3.1 Angle-measuring device rotational offset.
The tester
shall maintain a record of the angle-measuring device rotational offset, RADO,
as defined in section 3.1. Note that RADO is assigned a value of 0°
when the angle-measuring device is aligned to within ±1° of the rotational
position of the reference scribe line. The RADO shall be used to
determine the yaw angle of flow in accordance with section 8.9.4.
8.3.2 Sign of angle-measuring device rotational offset.
The sign of RADO
is positive when the angle-measuring device (as viewed from the ‘‘tail’’ end of
the probe) is positioned in a clockwise direction from the reference scribe
line and negative when the device is positioned in a counterclockwise direction
from the reference scribe line.
8.3.3 Angle-measuring devices that can be independently adjusted
Angle-measuring
devices that can be independently adjusted (e.g., by means of a set screw),
after being locked into position on the probe sheath, may be used. However, the
RADO must also take into account this adjustment.
8.3.4 Post-test check.
If probe
extensions remain attached to the main probe throughout the field test, the
rotational position check shall be repeated, at a minimum, at the completion of
the field test to ensure that the angle-measuring device has remained within
±2° of its rotational position established prior to testing. At the discretion
of the tester, additional checks may be conducted after completion of testing
at any sample port or after any test run. If the ±2° specification is not met,
all measurements made since the last successful rotational position check must
be repeated. Section 18.1.1.3 of Annex A provides an example procedure for
performing the post-test check.
8.3.5 Exceptions.
8.3.5.1 A
rotational position check need not be performed if, for measurements taken at
all velocity traverse points, the yaw angle-measuring device is mounted and
aligned directly on the reference scribe line specified in sections 6.1.5.1 and
6.1.5.3 and no independent adjustments, as described in section 8.3.3, are made
to device’s rotational position.
8.3.5.2 If
extensions are detached and reattached to the probe during a field test, a
rotational position check need only be performed the first time an extension is
added to the probe, rather than each time the extension is re-attached, if the
probe extension is designed to be locked into a mechanically fixed rotational
position (e.g., through the use of interlocking grooves), that can re-establish
the initial rotational position to within ±1°.
8.4 Leak Checks.
A pre-test
leak check shall be conducted before each field test. A post-test check shall
be performed at the end of the field test, but additional leak checks may be
conducted after any test run or group of test runs. The post-test check may
also serve as the pre-test check for the next group of test runs. If any leak
check is failed, all runs since the last passed leak check are invalid. While
performing the leak check procedures, also check each pressure device’s
responsiveness to changes in pressure.
8.4.1 To
perform the leak check on a Type S pitot tube, pressurize the pitot impact
opening until at least 7.6 cm H2O (3 in. H2O) velocity pressure, or a pressure
corresponding to approximately 75 percent of the pressure device’s measurement
scale, whichever is less, registers on the pressure device; then, close off the
impact opening. The pressure shall remain stable (±2.5 mm H2O, ±0.10 in. H2O)
for at least 15 seconds. Repeat this procedure for the static pressure side,
except use suction to obtain the required pressure. Other leak-check procedures
may be used, if approved by the Administrator.
8.4.2 To
perform the leak check on a 3-D probe, pressurize the probe’s impact (P1)
opening until at least 7.6 cm H2O (3 in. H2O) velocity pressure, or a pressure
corresponding to approximately 75 percent of the pressure device’s measurement
scale, whichever is less, registers on the pressure device; then, close off the
impact opening. The pressure shall remain stable (±2.5 mm H2O, ±0.10 in. H2O)
for at least 15 seconds. Check the P2 and P3 pressure ports in the same
fashion. Other leak-check procedures may be used, if approved by the
Administrator.
8.5 Zeroing the Differential Pressure-measuring Device.
Zero each
differential pressure-measuring device, including the device used for yaw
nulling, before each field test. At a minimum, check the zero after each field
test. A zero check may also be performed after any test run or group of test
runs. For fluid manometers and mechanical pressure gauges (e.g., Magnehelic®
gauges), the zero reading shall not deviate from zero by more than ±0.8 mm H2O
(±0.03 in. H2O) or one minor scale division, whichever is greater, between
checks. For electronic manometers, the zero reading shall not deviate from zero
between checks by more than: ±0.3 mm H2O (±0.01 in. H2O), for full scales less
than or equal to 5.1 cm H2O (2.0 in. H2O); or ±0.8 mm H2O (±0.03 in. H2O), for
full scales greater than 5.1 cm H2O (2.0 in. H2O). (Note: If negative zero drift is not directly
readable, estimate the reading based on the position of the gauge oil in the
manometer or of the needle on the pressure gauge.) In addition, for all
pressure-measuring devices except those used exclusively for yaw nulling, the
zero reading shall not deviate from zero by more than 5 percent of the average
measured differential pressure at any distinct process condition or load level.
If any zero check is failed at a specific process condition or load level, all
runs conducted at that process condition or load level since the last passed
zero check are invalid.
8.6 Traverse Point Verification.
The number and
location of the traverse points shall be selected based on Method 1 guidelines.
The stack or duct diameter and port nipple lengths, including any extension of
the port nipples into the stack or duct, shall be verified the first time the
test is performed; retain and use this information for subsequent field tests,
updating it as required. Physically measure the stack or duct dimensions or use
a calibrated laser device; do not use engineering drawings of the stack or
duct. The probe length necessary to reach each traverse point shall be recorded
to within ±6.4 mm (±1⁄4 in.) and, for manual probes, marked on the probe
sheath. In determining these lengths, the tester shall take into account both
the distance that the port flange projects outside of the stack and the depth
that any port nipple extends into the gas stream. The resulting point positions
shall reflect the true distances from the inside wall of the stack or duct, so
that when the tester aligns any of the markings with the outside face of the
stack port, the probe’s impact port shall be located at the appropriate
distance from the inside wall for the respective Method 1 traverse point.
Before beginning testing at a particular location, an out-of-stack or duct
verification shall be performed on each probe that will be used to ensure that
these position markings are correct. The distances measured during the
verification must agree with the previously calculated distances to within ±1⁄4
in. For manual probes, the traverse point positions shall be verified by
measuring the distance of each mark from the probe’s impact pressure port (the
P1 port for a 3-D probe). A comparable out-of-stack test shall be performed on
automated probe systems. The probe shall be extended to each of the prescribed
traverse point positions. Then, the accuracy of the positioning for each
traverse point shall be verified by measuring the distance between the port
flange and the probe’s impact pressure port.
8.7 Probe Installation.
Insert the
probe into the test port. A solid material shall be used to seal the port.
8.8 System Response Time.
Determine the
response time of the probe measurement system. Insert and position the ‘‘cold’’
probe (at ambient temperature and pressure) at any Method 1 traverse point.
Read and record the probe differential pressure, temperature, and elapsed time
at 15-second intervals until stable readings for both pressure and temperature
are achieved. The response time is the longer of these two elapsed times.
Record the response time.
8.9 Sampling.
8.9.1 Yaw angle measurement protocol.
With manual
probes, yaw angle measurements may be obtained in two alternative ways during
the field test, either by using a yaw angle-measuring device (e.g., digital
inclinometer) affixed to the probe, or using a protractor wheel and pointer
assembly. For horizontal traversing, either approach may be used. For vertical
traversing, i.e., when measuring from on top or into the bottom of a horizontal
duct, only the protractor wheel and pointer assembly may be used. With
automated probes, curve-fitting protocols may be used to obtain yaw angle
measurements.
8.9.1.1 If a
yaw angle-measuring device affixed to the probe is to be used, lock the device
on the probe sheath, aligning it either on the reference scribe line or in the
rotational offset position established under section 8.3.1.
8.9.1.2 If a
protractor wheel and pointer assembly is to be used, follow the procedures in Annex B of this method.
8.9.1.3
Curve-fitting procedures. Curve-fitting routines sweep through a range of yaw
angles to create curves correlating pressure to yaw position. To find the zero
yaw position and the yaw angle of flow, the curve found in the stack is
computationally compared to a similar curve that was previously generated under
controlled conditions in a wind tunnel. A probe system that uses a
curve-fitting routine for determining the yaw-null position of the probe head
may be used, provided that it is verified in a wind tunnel to be able to
determine the yaw angle of flow to within ±1°.
8.9.1.4 Other
yaw angle determination procedures. If approved by the Administrator, other
procedures for determining yaw angle may be used, provided that they are
verified in a wind tunnel to be able to perform the yaw angle calibration
procedure as described in section 10.5.
8.9.2 Sampling strategy.
At each
traverse point, first yaw-null the probe, as described in section 8.9.3, below.
Then, with the probe oriented into the direction of flow, measure and record
the yaw angle, the differential pressure and the temperature at the traverse
point, after stable readings are achieved, in accordance with sections 8.9.4
and 8.9.5. At the start of testing in each port (i.e., after a probe has been
inserted into the flue gas stream), allow at least the response time to elapse
before beginning to take measurements at the first traverse point accessed from
that port. Provided that the probe is not removed from the flue gas stream,
measurements may be taken at subsequent traverse points accessed from the same
test port without waiting again for the response time to elapse.
8.9.3 Yaw-nulling procedure.
In preparation
for yaw angle determination, the probe must first be yaw nulled. After
positioning the probe at the appropriate traverse point, perform the following
procedures.
8.9.3.1 For
Type S probes, rotate the probe until a null differential pressure reading is
obtained. The direction of the probe rotation shall be such that the
thermocouple is located downstream of the probe pressure ports at the yaw-null
position. Rotate the probe 90° back from the yaw-null position to orient the
impact pressure port into the direction of flow. Read and record the angle
displayed by the angle-measuring device.
8.9.3.2 For
3-D probes, rotate the probe until a null differential pressure reading (the
difference in pressures across the P2 and P3 pressure ports is zero, i.e., P2 =
P3) is indicated by the yaw angle pressure gauge. Read and record the angle
displayed by the angle-measuring device.
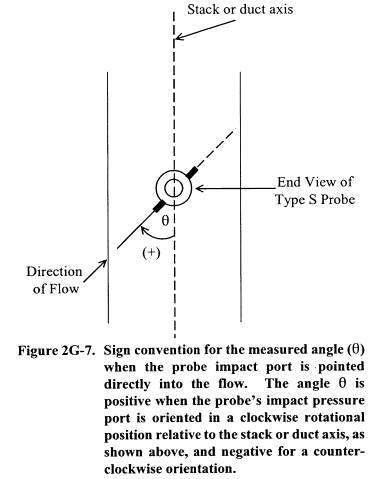
8.9.3.3 Sign
of the measured angle. The angle displayed on the angle-measuring device is
considered positive when the probe’s impact pressure port (as viewed from the
‘‘tail’’ end of the probe) is oriented in a clockwise rotational position
relative to the stack or duct axis and is considered negative when the probe’s
impact pressure port is oriented in a counterclockwise rotational position (see
Figure 2G-7).
8.9.4 Yaw angle determination.
After
performing the applicable yaw-nulling procedure in section 8.9.3, determine the
yaw angle of flow according to one of the following procedures. Special care
must be observed to take into account the signs of the recorded angle reading
and all offsets.
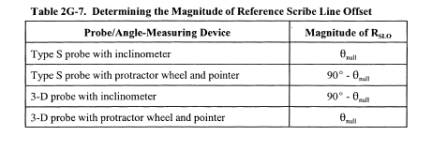
8.9.4.1
Direct-reading. If all rotational offsets are zero or if the angle-measuring
device rotational offset (RADO) determined in section 8.3 exactly
compensates for the scribe line rotational offset (RSLO) determined
in section 10.5, then the magnitude of the yaw angle is equal to the displayed
angle-measuring device reading from section 8.9.3.1 or 8.9.3.2. The algebraic
sign of the yaw angle is determined in accordance with section 8.9.3.3. [Note:
Under certain
circumstances (e.g., testing of horizontal ducts) a 90° adjustment to the
angle-measuring device readings may be necessary to obtain the correct yaw
angles.]
8.9.4.2
Compensation for rotational offsets during data reduction. When the angle-measuring
device rotational offset does not compensate for reference scribe line
rotational offset, the following procedure shall be used to determine the yaw
angle:
(a) Enter the reading indicated by the
angle-measuring device from section 8.9.3.1 or 8.9.3.2.
(b) Associate
the proper algebraic sign from section 8.9.3.3 with the reading in step (a).
(c) Subtract
the reference scribe line rotational offset, RSLO, from the reading
in step (b).
(d) Subtract
the angle-measuring device rotational offset, RADO, if any, from the
result obtained in step (c).
(e) The final
result obtained in step (d) is the yaw angle of flow.
[Note: It may be necessary to first apply a 90°
adjustment to the reading in step (a), in order to obtain the correct yaw
angle.]
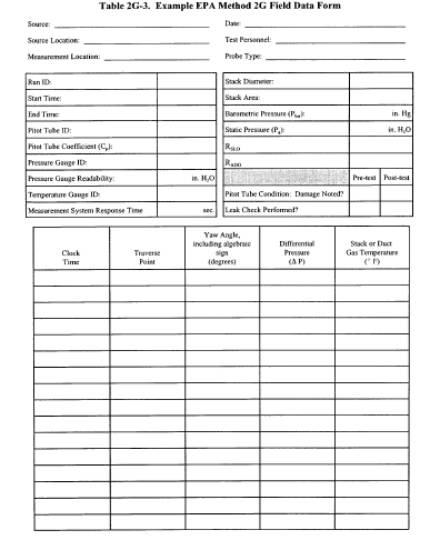
8.9.4.3 Record
the yaw angle measurements on a form similar to Table 2G-3.
8.9.5 Impact velocity determination.
Maintain the
probe rotational position established during the yaw angle determination. Then,
begin recording the pressure-measuring device readings. These pressure
measurements shall be taken over a sampling period of sufficiently long
duration to ensure representative readings at each traverse point. If the
pressure measurements are determined from visual readings of the pressure
device or display, allow sufficient time to observe the pulsation in the
readings to obtain a sight-weighted average, which is then recorded manually.
If an automated data acquisition system (e.g., data logger, computer-based data
recorder, strip chart recorder) is used to record the pressure measurements,
obtain an integrated average of all pressure readings at the traverse point.
Stack or duct gas temperature measurements shall be recorded, at a minimum,
once at each traverse point. Record all necessary data as shown in the example
field data form (Table 2G-3).
8.9.6 Alignment check.
For manually
operated probes, after the required yaw angle and differential pressure and
temperature measurements have been made at each traverse point, verify (e.g.,
by visual inspection) that the yaw angle-measuring device has remained in
proper alignment with the reference scribe line or with the rotational offset
position established in section 8.3. If, for a particular traverse point, the
angle-measuring device is found to be in proper alignment, proceed to the next
traverse point; otherwise, re-align the device and repeat the angle and
differential pressure measurements at the traverse point. In the course of a
traverse, if a mark used to properly align the angle-measuring device (e.g., as
described in section 18.1.1.1) cannot be located, re-establish the alignment
mark before proceeding with the traverse.
8.10 Probe Plugging.
Periodically
check for plugging of the pressure ports by observing the responses on the
pressure differential readouts. Plugging causes erratic results or sluggish
responses. Rotate the probe to determine whether the readouts respond in the
expected direction. If plugging is detected, correct the problem and repeat the
affected measurements.
8.11 Static Pressure.
Measure the
static pressure in the stack or duct using the equipment described in section
6.7.
8.11.1 If a
Type S probe is used for this measurement, position the probe at or between any
traverse point(s) and rotate the probe until a null differential pressure
reading is obtained. Disconnect the tubing from one of the pressure ports; read
and record the Delta P. For pressure devices with one-directional scales, if a
deflection in the positive direction is noted with the negative side
disconnected, then the static pressure is positive. Likewise, if a deflection
in the positive direction is noted with the positive side disconnected, then
the static pressure is negative.
8.11.2 If a
3-D probe is used for this measurement, position the probe at or between any
traverse point(s) and rotate the probe until a null differential pressure
reading is obtained at P2-P3. Rotate the probe 90°. Disconnect the P2 pressure
side of the probe and read the pressure P1-Pbar and record as the static pressure.
(Note: The spherical
probe, specified in section 6.1.2 of Method 2F, is unable to provide this
measurement and shall not be used to take static pressure measurements.)
8.12 Atmospheric Pressure.
Determine the
atmospheric pressure at the sampling elevation during each test run following
the procedure described in section 2.5 of Method 2.
8.13 Molecular Weight.
Determine the
stack or duct gas dry molecular weight. For combustion processes or processes
that emit essentially CO2, O2, CO, and N2, use Method 3 or 3A. For processes
emitting essentially air, an analysis need not be conducted; use a dry
molecular weight of 29.0. Other methods may be used, if approved by the
Administrator.
8.14 Moisture.
Determine the
moisture content of the stack gas using Method 4 or equivalent.
8.15 Data Recording and Calculations.
Record all
required data on a form similar to Table 2G-3.
8.15.1 2-D
probe calibration coefficient. When a Type S pitot tube is used in the field,
the appropriate calibration coefficient as determined in section 10.6 shall be
used to perform velocity calculations. For calibrated Type S pitot tubes, the
A-side coefficient shall be used when the A-side of the tube faces the flow,
and the B-side coefficient shall be used when the B-side faces the flow.
8.15.2 3-D
calibration coefficient. When a 3-D probe is used to collect data with this
method, follow the provisions for the calibration of 3-D probes in section 10.6
of Method 2F to obtain the appropriate velocity calibration coefficient (F2 as
derived using Equation 2F-2 in Method 2F)
corresponding to a pitch angle position of 0°.
8.15.3
Calculations. Calculate the yaw-adjusted velocity at each traverse point using
the equations presented in section 12.2. Calculate the test run average stack
gas velocity by finding the arithmetic average of the point velocity results in
accordance with sections 12.3 and 12.4, and calculate the stack gas volumetric flow
rate in accordance with section 12.5 or 12.6, as applicable.
9.0 Quality Control
9.1 Quality Control Activities.
In conjunction
with the yaw angle determination and the pressure and temperature measurements
specified in section 8.9, the following quality control checks should be
performed.
9.1.1 Range of the differential pressure gauge.
In accordance
with the specifications in section 6.4, ensure that the proper differential
pressure gauge is being used for the range of Delta P values encountered. If it
is necessary to change to a more sensitive gauge, replace the gauge with a
gauge calibrated according to section 10.3.3, perform the leak check described
in section 8.4 and the zero check described in section 8.5, and repeat the
differential pressure and temperature readings at each traverse point.
9.1.2 Horizontal stability check.
For horizontal
traverses of a stack or duct, visually check that the probe shaft is maintained
in a horizontal position prior to taking a pressure reading. Periodically, during
a test run, the probe’s horizontal stability should be verified by placing a
carpenter’s level, a digital inclinometer, or other angle-measuring device on
the portion of the probe sheath that extends outside of the test port. A
comparable check should be performed by automated systems.
10.0 Calibration
10.1 Wind Tunnel Qualification Checks.
To qualify for
use in calibrating probes, a wind tunnel shall have the design features
specified in section 6.11 and satisfy the following qualification criteria. The
velocity pressure cross-check in section 10.1.1 and axial flow verification in
section 10.1.2 shall be performed before the initial use of the wind tunnel and
repeated immediately after any alteration occurs in the wind tunnel’s
configuration, fans, interior surfaces, straightening vanes, controls, or other
properties that could reasonably be expected to alter the flow pattern or
velocity stability in the tunnel. The owner or operator of a wind tunnel used
to calibrate probes according to this method shall maintain records documenting
that the wind tunnel meets the requirements of sections 10.1.1 and 10.1.2 and
shall provide these records to the Administrator upon request.
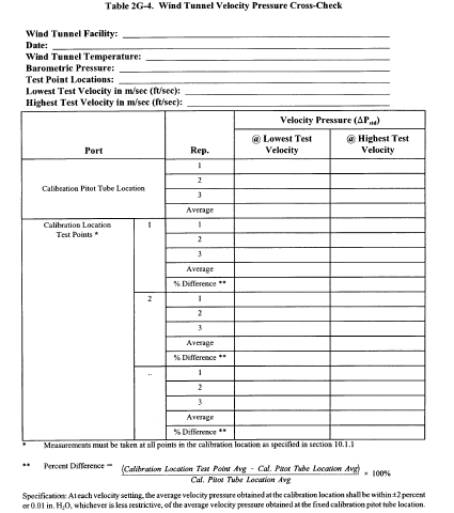
10.1.1 Velocity pressure cross-check.
To verify that
the wind tunnel produces the same velocity at the tested probe head as at the
calibration pitot tube impact port, perform the following cross-check. Take
three differential pressure measurements at the fixed calibration pitot tube
location, using the calibration pitot tube specified in section 6.10, and take
three measurements with the calibration pitot tube at the wind tunnel
calibration location, as defined in section 3.21. Alternate the measurements
between the two positions. Perform this procedure at the lowest and highest
velocity settings at which the probes will be calibrated. Record the values on
a form similar to Table 2G-4. At each velocity setting,
the average velocity pressure obtained at the wind tunnel calibration location
shall be within ±2 percent or 2.5 mm H2O (0.01 in. H2O), whichever is less
restrictive, of the average velocity pressure obtained at the fixed calibration
pitot tube location. This comparative check shall be performed at 2.5-cm
(1-in.), or smaller, intervals across the full length, width, and depth (if
applicable) of the wind tunnel calibration location. If the criteria are not
met at every tested point, the wind tunnel calibration location must be
redefined, so that acceptable results are obtained at every point. Include the results
of the velocity pressure cross-check in the calibration data section of the
field test report. (See section 16.1.4.)
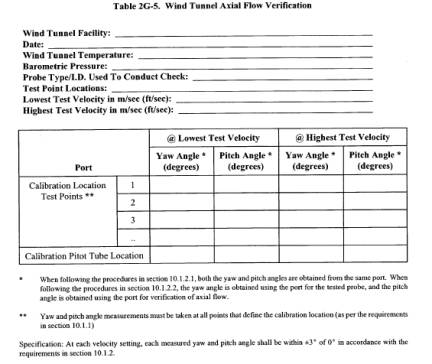
10.1.2 Axial flow verification.
The following
procedures shall be performed to demonstrate that there is fully developed
axial flow within the wind tunnel calibration location and at the calibration
pitot tube location. Two options are available to conduct this check.
10.1.2.1 Using
a calibrated 3-D probe. A probe that has been previously calibrated in a wind
tunnel with documented axial flow (as defined in section 3.22) may be used to
conduct this check. Insert the calibrated 3-D probe into the wind tunnel test
section using the tested probe port. Following the procedures in sections 8.9 and 12.2 of Method 2F, determine
the yaw and pitch angles at all the point(s) in the test section where the
velocity pressure cross-check, as specified in section 10.1.1, is performed.
This includes all the points in the calibration location and the point where
the calibration pitot tube will be located. Determine the yaw and pitch angles
at each point. Repeat these measurements at the highest and lowest velocities
at which the probes will be calibrated. Record the values on a form similar to
Table 2G-5. Each measured yaw and pitch angle shall be within ±3@ of 0@.
Exceeding the limits indicates unacceptable flow in the test section. Until the
problem is corrected and acceptable flow is verified by repetition of this
procedure, the wind tunnel shall not be used for calibration of probes. Include
the results of the axial flow verification in the calibration data section of
the field test report. (See section 16.1.4.)
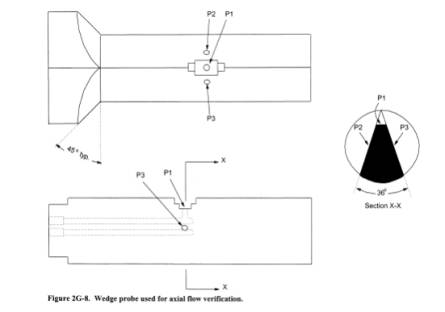
10.1.2.2 Using
alternative probes. Axial flow verification may be performed using an
uncalibrated prism-shaped 3-D probe (e.g., DA or DAT probe) or an uncalibrated
wedge probe. (Figure 2G-8 illustrates a typical wedge
probe.) This approach requires use of two ports: the tested probe port and a
second port located 90° from the tested probe port. Each port shall provide
access to all the points within the wind tunnel test section where the velocity
pressure cross-check, as specified in section 10.1.1, is conducted. The probe
setup shall include establishing a reference yaw-null position on the probe
sheath to serve as the location for installing the angle-measuring device.
Physical design features of the DA, DAT, and wedge probes are relied on to
determine the reference position. For the DA or DAT probe, this reference
position can be determined by setting a digital inclinometer on the flat facet
where the P1 pressure port is located and then identifying the rotational
position on the probe sheath where a second angle-measuring device would give
the same angle reading. The reference position on a wedge probe shaft can be
determined either geometrically or by placing a digital inclinometer on each
side of the wedge and rotating the probe until equivalent readings are
obtained. With the latter approach, the reference position is the rotational
position on the probe sheath where an angle-measuring device would give a
reading of 0°. After installation of the angle-measuring device in the
reference yaw-null position on the probe sheath, determine the yaw angle from
the tested port. Repeat this measurement using the 90° offset port, which
provides the pitch angle of flow. Determine the yaw and pitch angles at all the
point(s) in the test section where the velocity pressure cross-check, as
specified in section 10.1.1, is performed. This includes all the points in the
wind tunnel calibration location and the point where the calibration pitot tube
will be located. Perform this check at the highest and lowest velocities at
which the probes will be calibrated. Record the values on a form similar to Table 2G-5. Each measured yaw and pitch angle shall be
within ±3° of 0°. Exceeding the limits indicates unacceptable flow in the test
section. Until the problem is corrected and acceptable flow is verified by
repetition of this procedure, the wind tunnel shall not be used for calibration
of probes. Include the results in the probe calibration report.
10.1.3 Wind tunnel audits.
10.1.3.1
Procedure. Upon the request of the Administrator, the owner or operator of a
wind tunnel shall calibrate a 2-D audit probe in accordance with the procedures
described in sections 10.3 through 10.6. The calibration shall be performed at
two velocities that encompass the velocities typically used for this method at
the facility. The resulting calibration data shall be submitted to the Agency
in an audit test report. These results shall be compared by the Agency to
reference calibrations of the audit probe at the same velocity settings
obtained at two different wind tunnels.
10.1.3.2
Acceptance criterion. The audited tunnel’s calibration coefficient is
acceptable if it is within 3 percent of the reference calibrations obtained at
each velocity setting by one (or both) of the wind tunnels. If the acceptance
criterion is not met at each calibration velocity setting, the audited wind
tunnel shall not be used to calibrate probes for use under this method until
the problems are resolved and acceptable results are obtained upon completion
of a subsequent audit.
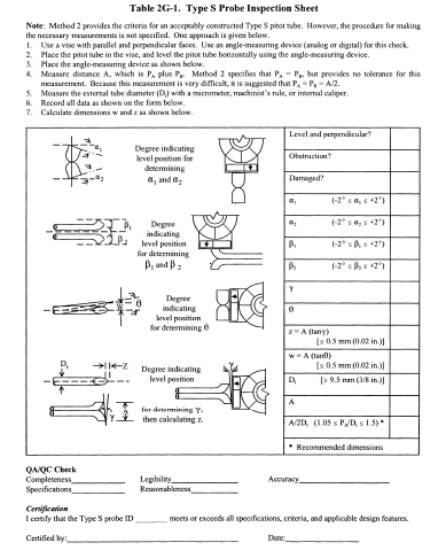
10.2 Probe Inspection.
10.2.1 Type S probe.
Before each
calibration of a Type S probe, verify that one leg of the tube is permanently
marked A, and the other, B. Carefully examine the pitot tube from the top,
side, and ends. Measure the angles (a1, a2, b1, and b2) and the dimensions (w
and z) illustrated in Figures 2-2 and 2-3 in
Method 2. Also measure the dimension A, as shown in the diagram in Table 2G-1,
and the external tubing diameter (dimension Dt, Figure 2-2b in Method 2). For
the purposes of this method, Dt shall be no less than 9.5 mm (3⁄8 in.). The
base-to-opening plane distances PA and PB in Figure 2-3 of Method 2 shall be
equal, and the dimension A in Table 2G-1 should be between 2.10Dt and 3.00Dt.
Record the inspection findings and probe measurements on a form similar to
Table CD2-1 of the ‘‘Quality Assurance Handbook for Air Pollution Measurement
Systems: Volume III, Stationary Source- Specific Methods’ (EPA/600/R-94/038c,
September 1994). For reference, this form is reproduced herein as Table 2G-1.
The pitot tube shall not be used under this method if it fails to meet the
specifications in this section and the alignment specifications in section
6.1.1. All Type S probes used to collect data with this method shall be
calibrated according to the procedures outlined in sections 10.3 through 10.6
below. During calibration, each Type S pitot tube shall be configured in the
same manner as used, or planned to be used, during the field test, including
all components in the probe assembly (e.g., thermocouple, probe sheath,
sampling nozzle). Probe shaft extensions that do not affect flow around the
probe head need not be attached during calibration.
10.2.2 3-D probe.
If a 3-D probe
is used to collect data with this method, perform the pre-calibration
inspection according to procedures in Method
2F, section 10.2.
10.3 Pre-Calibration Procedures.
Prior to
calibration, a scribe line shall have been placed on the probe in accordance
with section 10.4. The yaw angle and velocity calibration procedures shall not
begin until the pre-test requirements in sections 10.3.1 through 10.3.4 have
been met.
10.3.1 Perform
the horizontal straightness check described in section 8.2 on the probe
assembly that will be calibrated in the wind tunnel.
10.3.2 Perform
a leak check in accordance with section 8.4.
10.3.3 Except
as noted in section 10.3.3.3, calibrate all differential pressure-measuring
devices to be used in the probe calibrations, using the following procedures.
At a minimum, calibrate these devices on each day that probe calibrations are
performed.
10.3.3.1
Procedure. Before each wind tunnel use, all differential pressure-measuring
devices shall be calibrated against the reference device specified in section
6.4.3 using a common pressure source. Perform the calibration at three
reference pressures representing 30, 60, and 90 percent of the full-scale range
of the pressure-measuring device being calibrated. For an inclined vertical
manometer, perform separate calibrations on the inclined and vertical portions
of the measurement scale, considering each portion of the scale to be a
separate full-scale range. [For example, for a manometer with a 0-to 2.5-cm H2O
(0-to 1- in. H2O) inclined scale and a 2.5-to 12.7-cm H2O (1-to 5-in. H2O)
vertical scale, calibrate the inclined portion at 7.6, 15.2, and 22.9 mm H2O
(0.3, 0.6, and 0.9 in. H2O), and calibrate the vertical portion at 3.8, 7.6, and
11.4 cm H2O (1.5, 3.0, and 4.5 in. H2O).] Alternatively, for the vertical
portion of the scale, use three evenly spaced reference pressures, one of which
is equal to or higher than the highest differential pressure expected in field
applications.
10.3.3.2
Acceptance criteria. At each pressure setting, the two pressure readings made
using the reference device and the pressure-measuring device being calibrated
shall agree to within #2 percent of full scale of the device being calibrated
or 0.5 mm H2O (0.02 in. H2O), whichever is less restrictive. For an
inclined-vertical manometer, these requirements shall be met separately using
the respective full-scale upper limits of the inclined and vertical portions of
the scale. Differential pressure-measuring devices not meeting the #2 percent
of full scale or 0.5 mm H2O (0.02 in. H2O) calibration requirement shall not be
used.
10.3.3.3
Exceptions. Any precision manometer that meets the specifications for a
reference device in section 6.4.3 and that is not used for field testing does
not require calibration, but must be leveled and zeroed before each wind tunnel
use. Any pressure device used exclusively for yaw nulling does not require
calibration, but shall be checked for responsiveness to rotation of the probe
prior to each wind tunnel use.
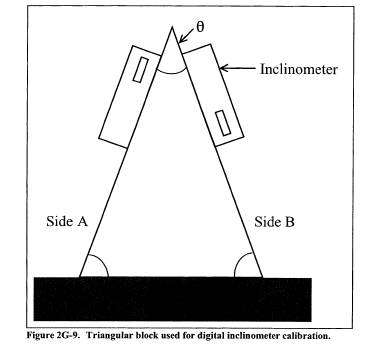
10.3.4
Calibrate digital inclinometers on each day of wind tunnel or field testing
(prior to beginning testing) using the following procedures. Calibrate the inclinometer
according to the manufacturer’s calibration procedures. In addition, use a
triangular block (illustrated in Figure 2G-9) with a
known angle, ’’, independently determined using a protractor or equivalent
device, between two adjacent sides to verify the inclinometer readings. (Note:
If other angle-measuring
devices meeting the provisions of section 6.2.3 are used in place of a digital
inclinometer, comparable calibration procedures shall be performed on such
devices.) Secure the triangular block in a fixed position. Place the
inclinometer on one side of the block (side A) to measure the angle of
inclination (R1). Repeat this measurement on the adjacent side of the block
(side B) using the inclinometer to obtain a second angle reading (R2). The
difference of the sum of the two readings from 180° (i.e., 180R1R2) shall be
within #2 of the known angle, ‘‘.
10.4 Placement of Reference Scribe Line.
Prior to the
first calibration of a probe, a line shall be permanently inscribed on the main
probe sheath to serve as a reference mark for determining yaw angles. Annex C
in section 18 of this method gives a guideline for placement of the reference
scribe line.
10.4.1
This reference scribe line shall meet the specifications in sections 6.1.5.1
and 6.1.5.3 of this method. To verify that the alignment specification in
section 6.1.5.3 is met, secure the probe in a horizontal position and measure
the rotational angle of each scribe line and scribe line segment using an
angle-measuring device that meets the specifications in section 6.2.1 or 6.2.3.
For any scribe line that is longer than 30.5 cm (12 in.), check the line’s
rotational position at 30.5-cm (12-in.) intervals. For each line segment that
is 12 in. or less in length, check the rotational position at the two endpoints
of the segment. To meet the alignment specification in section 6.1.5.3, the
minimum and maximum of all of the rotational angles that are measured along the
full length of main probe must not differ by more than 2°. (Note: A short reference scribe line segment
[e.g., 15.2 cm (6 in.) or less in length] meeting the alignment specifications
in section 6.1.5.3 is fully acceptable under this method. See section 18.1.1.1
of Annex A for an example of a probe marking procedure, suitable for use with a
short reference scribe line.)
10.4.2 The
scribe line should be placed on the probe first and then its offset from the
yaw-null position established (as specified in section 10.5). The rotational
position of the reference scribe line relative to the yaw-null position of the
probe, as determined by the yaw angle calibration procedure in section 10.5, is
the reference scribe line rotational offset, RSLO. The reference
scribe line rotational offset shall be recorded and retained as part of the
probe’s calibration record.
10.4.3 Scribe
line for automated probes. A scribe line may not be necessary for an automated
probe system if a reference rotational position of the probe is built into the
probe system design. For such systems, a ‘‘flat’’ (or comparable, clearly
identifiable physical characteristic) should be provided on the probe casing or
flange plate to ensure that the reference position of the probe assembly
remains in a vertical or horizontal position. The rotational offset of the flat
(or comparable, clearly identifiable physical characteristic) needed to orient
the reference position of the probe assembly shall be recorded and maintained
as part of the automated probe system’s specifications.
10.5 Yaw Angle Calibration Procedure.
For each probe
used to measure yaw angles with this method, a calibration procedure shall be
performed in a wind tunnel meeting the specifications in section 10.1 to
determine the rotational position of the reference scribe line relative to the
probe’s yaw-null position. This procedure shall be performed on the main probe
with all devices that will be attached to the main probe in the field [such as
thermocouples, resistance temperature detectors (RTDs), or sampling nozzles]
that may affect the flow around the probe head. Probe shaft extensions that do
not affect flow around the probe head need not be attached during calibration.
At a minimum, this procedure shall include the following steps.
10.5.1 Align
and lock the angle-measuring device on the reference scribe line. If a marking
procedure (such as described in section 18.1.1.1) is used, align the
angle-measuring device on a mark within ±1° of the rotational position of the
reference scribe line. Lock the angle-measuring device onto the probe sheath at
this position.
10.5.2 Zero
the pressure-measuring device used for yaw nulling.
10.5.3 Insert
the probe assembly into the wind tunnel through the entry port, positioning the
probe’s impact port at the calibration location. Check the responsiveness of the
pressure-measurement device to probe rotation, taking corrective action if the
response is unacceptable.
10.5.4 Ensure
that the probe is in a horizontal position, using a carpenter’s level.
10.5.5 Rotate
the probe either clockwise or counterclockwise until a yaw null [zero Delta P
for a Type S probe or zero (P2-P3) for a 3-D probe] is obtained. If using a
Type S probe with an attached thermocouple, the direction of the probe rotation
shall be such that the thermocouple is located downstream of the probe pressure
ports at the yaw-null position.
10.5.6 Use the
reading displayed by the angle-measuring device at the yaw-null position to
determine the magnitude of the reference scribe line rotational offset, RSLO,
as defined in section 3.15. Annex D in section 18 of
this method gives a recommended procedure for determining the magnitude of RSLO
with a digital inclinometer and a second procedure for determining the
magnitude of RSLO with a protractor wheel and pointer device. Table
2G-6 gives an example data form and Table 2G-7 is a
look-up table with the recommended procedure. Procedures other than those
recommended in Annex D in section 18 may be used, if they can determine RSLO
to within 1° and are explained in detail in the field test report. The
algebraic sign of RSLO will either be positive if the rotational
position of the reference scribe line (as viewed from the ‘‘tail’’ end of the
probe) is clockwise, or negative, if counterclockwise with respect to the
probe’s yaw-null position. (This is illustrated in Figure
2G-10.)
10.5.7 The
steps in sections 10.5.3 through 10.5.6 shall be performed twice at each of the
velocities at which the probe will be calibrated (in accordance with section
10.6). Record the values of RSLO.
10.5.8 The
average of all of the RSLO values shall be documented as the
reference scribe line rotational offset for the probe.
10.5.9 Use of reference
scribe line offset. The reference scribe line rotational offset shall be used
to determine the yaw angle of flow in accordance with section 8.9.4.
10.6 Velocity Calibration Procedure.
When a 3-D
probe is used under this method, follow the provisions for the calibration of
3-D probes in section 10.6 of Method 2F to obtain the necessary velocity
calibration coefficients (F2 as derived using Equation 2F-2 in Method 2F)
corresponding to a pitch angle position of 0°. The following procedure applies to
Type S probes. This procedure shall be performed on the main probe and all
devices that will be attached to the main probe in the field (e.g.,
thermocouples, RTDs, sampling nozzles) that may affect the flow around the
probe head. Probe shaft extensions that do not affect flow around the probe
head need not be attached during calibration. (Note: If a sampling nozzle is
part of the assembly, two additional requirements must be satisfied before
proceeding. The distance between the nozzle and the pitot tube shall meet the
minimum spacing requirement prescribed in Method 2, and a wind tunnel
demonstration shall be performed that shows the probe’s ability to yaw null is
not impaired when the nozzle is drawing sample.) To obtain velocity calibration
coefficient(s) for the tested probe, proceed as follows.
10.6.1
Calibration velocities. The tester may calibrate the probe at two nominal wind
tunnel velocity settings of 18.3 m/sec and 27.4 m/sec (60 ft/sec and 90 ft/sec)
and average the results of these calibrations, as described in sections 10.6.12
through 10.6.14, in order to generate the calibration coefficient, Cp. If this
option is selected, this calibration coefficient may be used for all field
applications where the velocities are 9.1 m/sec (30 ft/sec) or greater.
Alternatively, the tester may customize the probe calibration for a particular
field test application (or for a series of applications), based on the expected
average velocity(ies) at the test site(s). If this option is selected, generate
the calibration coefficients by calibrating the probe at two nominal wind
tunnel velocity settings, one of which is less than or equal to and the other
greater than or equal to the expected average velocity(ies) for the field
application(s), and average the results as described in sections 10.6.12
through 10.6.14. Whichever calibration option is selected, the probe
calibration coefficient(s) obtained at the two nominal calibration velocities
shall meet the conditions specified in sections 10.6.12 through 10.6.14.
10.6.2 Connect
the tested probe and calibration pitot tube to their respective
pressure-measuring devices. Zero the pressure-measuring devices. Inspect and
leak-check all pitot lines; repair or replace them, if necessary. Turn on the
fan, and allow the wind tunnel air flow to stabilize at the first of the
selected nominal velocity settings.
10.6.3
Position the calibration pitot tube at its measurement location (determined as
outlined in section 6.11.4.3), and align the tube so that its tip is pointed
directly into the flow. Ensure that the entry port surrounding the tube is
properly sealed. The calibration pitot tube may either remain in the wind
tunnel throughout the calibration, or be removed from the wind tunnel while
measurements are taken with the probe being calibrated.
10.6.4 Check
the zero setting of each pressure-measuring device.
10.6.5 Insert
the tested probe into the wind tunnel and align it so that the designated
pressure port (e.g., either the A-side or B-side of a Type S probe) is pointed
directly into the flow and is positioned within the wind tunnel calibration
location (as defined in section 3.21). Secure the probe at the 0° pitch angle
position. Ensure that the entry port surrounding the probe is properly sealed.
10.6.6 Read
the differential pressure from the calibration pitot tube (Delta Pstd ), and
record its value. Read the barometric pressure to within ±2.5 mm Hg (±0.1 in.
Hg) and the temperature in the wind tunnel to within 0.6°C (1°F). Record these
values on a data form similar to Table 2G-8.
10.6.7 After
the tested probe’s differential pressure gauges have had sufficient time to
stabilize, yaw null the probe (and then rotate it back 90° for Type S probes),
then obtain the differential pressure reading (Delta P). Record the yaw angle
and differential pressure readings.
10.6.8 Take
paired differential pressure measurements with the calibration pitot tube and
tested probe (according to sections 10.6.6 and 10.6.7). The paired measurements
in each replicate can be made either simultaneously (i.e., with both probes in
the wind tunnel) or by alternating the measurements of the two probes (i.e.,
with only one probe at a time in the wind tunnel).
10.6.9 Repeat
the steps in sections 10.6.6 through 10.6.8 at the same nominal velocity
setting until three pairs of Delta P readings have been obtained from the
calibration pitot tube and the tested probe.
10.6.10 Repeat
the steps in sections 10.6.6 through 10.6.9 above for the A-side and B-side of
the Type S pitot tube. For a probe assembly constructed such that its pitot
tube is always used in the same orientation, only one side of the pitot tube
need be calibrated (the side that will face the flow). However, the pitot tube
must still meet the alignment and dimension specifications in section 6.1.1 and
must have an average deviation (s) value of 0.01 or less as provided in section
10.6.12.4.
10.6.11 Repeat
the calibration procedures in sections 10.6.6 through 10.6.10 at the second
selected nominal wind tunnel velocity setting.
10.6.12
Perform the following calculations separately on the A-side and B-side values.
10.6.12.1
Calculate a Cp value for each of the three replicates performed at the lower
velocity setting where the calibrations were performed using Equation 2-2 in section 4.1.4 of Method 2.
10.6.12.2
Calculate the arithmetic average, Cp(avg-low), of the three Cp values.
10.6.12.3
Calculate the deviation of each of the three individual values of Cp from the
A-side average Cp(avg-low) value using Equation 2-3 in Method 2.
10.6.12.4
Calculate the average deviation(s) of the three individual Cp values from
Cp(avg-low) using Equation 2-4 in Method 2. Use the Type S pitot tube only if
the values of s (side A) and s (side B) are less than or equal to 0.01. If both
A-side and B-side calibration coefficients are calculated, the absolute value
of the difference between Cp(avg-low) (side A) and Cp(avg-low) (side B) must
not exceed 0.01.
10.6.13 Repeat
the calculations in section 10.6.12 using the data obtained at the higher
velocity setting to derive the arithmetic Cp values at the higher velocity
setting, Cp(avg-high), and to determine whether the conditions in 10.6.12.4 are
met by both the A-side and B-side calibrations at this velocity setting.
10.6.14 Use
Equation 2G-1 to calculate the percent difference of the averaged Cp values at
the two calibration velocities.

The percent
difference between the averaged Cp values shall not exceed ±3 percent. If the
specification is met, average the A-side values of Cp(avg-low) and Cp(avg-high)
to produce a single A-side calibration coefficient, Cp. Repeat for the B-side
values if calibrations were performed on that side of the pitot. If the
specification is not met, make necessary adjustments in the selected velocity
settings and repeat the calibration procedure until acceptable results are
obtained.
10.6.15 If the
two nominal velocities used in the calibration were 18.3 and 27.4 m/sec (60 and
90 ft/sec), the average Cp from section 10.6.14 is applicable to all velocities
9.1 m/sec (30 ft/sec) or greater. If two other nominal velocities were used in
the calibration, the resulting average Cp value shall be applicable only in
situations where the velocity calculated using the calibration coefficient is
neither less than the lower nominal velocity nor greater than the higher
nominal velocity.
10.7 Recalibration.
Recalibrate
the probe using the procedures in section 10 either within 12 months of its
first field use after its most recent calibration or after 10 field tests (as
defined in section 3.3), whichever occurs later. In addition, whenever there is
visible damage to the probe head, the probe shall be recalibrated before it is
used again.
10.8 Calibration of pressure-measuring devices used in the field.
Before its
initial use in a field test, calibrate each pressure-measuring device (except
those used exclusively for yaw nulling) using the three-point calibration
procedure described in section 10.3.3. The device shall be recalibrated
according to the procedure in section 10.3.3 no later than 90 days after its
first field use following its most recent calibration. At the discretion of the
tester, more frequent calibrations (e.g., after a field test) may be performed.
No adjustments, other than adjustments to the zero setting, shall be made to
the device between calibrations.
10.8.1 Post-test calibration check.
A single-point
calibration check shall be performed on each pressure-measuring device after
completion of each field test. At the discretion of the tester, more frequent
single-point calibration checks (e.g., after one or more field test runs) may
be performed. It is recommended that the post-test check be performed before
leaving the field test site. The check shall be performed at a pressure between
50 and 90 percent of full scale by taking a common pressure reading with the
tested probe and a reference pressure-measuring device (as described in section
6.4.4) or by challenging the tested device with a reference pressure source (as
described in section 6.4.4) or by performing an equivalent check using a
reference device approved by the Administrator.
10.8.2 Acceptance criterion.
At the
selected pressure setting, the pressure readings made using the reference
device and the tested device shall agree to within ±3 percent of full scale of
the tested device or 0.8 mm H2O (0.03 in. H2O), whichever is less restrictive.
If this specification is met, the test data collected during the field test are
valid. If the specification is not met, all test data collected since the last
successful calibration or calibration check are invalid and shall be repeated
using a pressure-measuring device with a current, valid calibration. Any device
that fails the calibration check shall not be used in a field test until a
successful recalibration is performed according to the procedures in section
10.3.3.
10.9 Temperature Gauges.
Same as Method
2, section 4.3. The alternative thermocouple calibration procedures outlined in
Emission Measurement Center (EMC) Approved Alternative Method (ALT-011)
‘‘Alternative Method 2 Thermocouple Calibration Procedure’’ may be performed.
Temperature gauges shall be calibrated no more than 30 days prior to the start
of a field test or series of field tests and recalibrated no more than 30 days
after completion of a field test or series of field tests.
10.10 Barometer.
Same as Method
2, section 4.4. The barometer shall be calibrated no more than 30 days prior to
the start of a field test or series of field tests.
11.0 Analytical Procedure
Sample
collection and analysis are concurrent for this method (see section 8.0).
12.0 Data Analysis and Calculations
These
calculations use the measured yaw angle and the differential pressure and
temperature measurements at individual traverse points to derive the near-axial
flue gas velocity (a(ii)) at each of those points. The near-axial velocity
values at all traverse points that comprise a full stack or duct traverse are
then averaged to obtain the average near-axial stack or duct gas velocity
a(avg).
12.1 Nomenclature
A =
Cross-sectional area of stack or duct at the test port location, m2 (ft2).
Bws = Water
vapor in the gas stream (from Method 4 or alternative), proportion by
volume.
Cp = Pitot
tube calibration coefficient, dimensionless.
F2(i) = 3-D
probe velocity coefficient at 0 pitch, applicable at traverse point i.
Kp = Pitot
tube constant,
for the metric
system, and
for the
English system.
Md = Molecular
weight of stack or duct gas, dry basis (see section 8.13), g/g-mole (lb/
lb-mole).
Ms = Molecular
weight of stack or duct gas, wet basis, g/g-mole (lb/lb-mole).
![]()
Pbar =
Barometric pressure at velocity measurement site, mm Hg (in. Hg).
Pg = Stack or
duct static pressure, mm H2O (in. H2O).
Ps = Absolute
stack or duct pressure, mm Hg (in. Hg),
![]()
Pstd =
Standard absolute pressure, 760 mm Hg (29.92 in. Hg).
13.6 =
Conversion from mm H2O (in. H2O) to mm Hg (in. Hg).
Qsd = Average
dry-basis volumetric stack or duct gas flow rate corrected to standard
conditions, dscm/hr (dscf/hr).
Qsw = Average
wet-basis volumetric stack or duct gas flow rate corrected to standard
conditions, wscm/hr (wscf/hr).
ts(i) = Stack
or duct temperature, °C (°F), at traverse point i.
Ts(i) =
Absolute stack or duct temperature, °K (°R), at traverse point i.
![]()
for the metric
system, and
![]()
for the
English system.
Ts(avg)=Average
absolute stack or duct gas temperature across all traverse points.
Tstd=Standard absolute
temperature, 293°K (528°R).
va(i)=Measured
stack or duct gas impact velocity, m/sec (ft/sec), at traverse point i.
va(avg)=Average
near-axial stack or duct gas velocity, m/sec (ft/sec) across all traverse
points.
Delta
Pi=Velocity head (differential pressure) of stack or duct gas, mm H2O (in.
H2O), applicable at traverse point i.
(P1-P2)=Velocity
head (differential pressure) of stack or duct gas measured by a 3-D probe, mm
H2O (in. H2O), applicable at traverse point i.
3,600=Conversion
factor, sec/hr.
18.0=Molecular
weight of water, g/g-mole (lb/lb-mole).
0y(i)=Yaw
angle of the flow velocity vector, at traverse point i.
n=Number of
traverse points.
12.2 Traverse Point Velocity Calculations.
Perform the
following calculations from the measurements obtained at each traverse point.
12.2.1 Selection of calibration coefficient.
Select the
calibration coefficient as described in section 10.6.1.
12.2.2 Near-axial traverse point velocity.
When using a
Type S probe, use the following equation to calculate the traverse point
near-axial velocity (va(i)) from the differential pressure (Delta Pi), yaw
angle (0y(i)), absolute stack or duct standard temperature (Ts(i))
measured at traverse point i, the absolute stack or duct pressure (Ps), and
molecular weight (Ms).

Use the
following equation when using a 3-D probe.

12.2.3 Handling multiple measurements at a traverse point.
For pressure
or temperature devices that take multiple measurements at a traverse point, the
multiple measurements (or where applicable, their square roots) may first be
averaged and the resulting average values used in the equations above.
Alternatively, the individual measurements may be used in the equations above
and the resulting calculated values may then be averaged to obtain a single
traverse point value. With either approach, all of the individual measurements
recorded at a traverse point must be used in calculating the applicable
traverse point value.
12.3 Average Near-Axial Velocity in Stack or Duct.
Use the
reported traverse point near-axial velocity in the following equation.
12.4 Acceptability of Results.
The
acceptability provisions in section 12.4 of Method 2F apply to 3-D probes used
under Method 2G. The following provisions apply to Type S probes. For Type S
probes, the test results are acceptable and the calculated value of va(avg) may
be reported as the average near-axial velocity for the test run if the
conditions in either section 12.4.1 or 12.4.2 are met.
12.4.1 The
average calibration coefficient Cp used in Equation 2G-6 was generated at
nominal velocities of 18.3 and 27.4 m/sec (60 and 90 ft/sec) and the value of
va(avg) calculated using Equation 2G-8 is greater than or equal to 9.1 m/sec
(30 ft/sec).
12.4.2 The
average calibration coefficient Cp used in Equation 2G-6 was generated at
nominal velocities other than 18.3 or 27.4 m/ sec (60 or 90 ft/sec) and the
value of va(avg) calculated using Equation 2G-8 is greater than or equal to the
lower nominal velocity and less than or equal to the higher nominal velocity
used to derive the average Cp.
12.4.3 If the
conditions in neither section 12.4.1 nor section 12.4.2 are met, the test
results obtained from Equation 2G-8 are not acceptable, and the steps in
sections 12.2 and 12.3 must be repeated using an average calibration
coefficient Cp that satisfies the conditions in section 12.4.1 or 12.4.2.
12.5 Average Gas Volumetric Flow Rate in Stack or Duct (Wet Basis).
Use the
following equation to compute the average volumetric flow rate on a wet basis.

12.6 Average Gas Volumetric Flow Rate in Stack or Duct (Dry Basis).
Use the
following equation to compute the average volumetric flow rate on a dry basis.

13.0 Method Performance. [Reserved]
14.0 Pollution Prevention. [Reserved]
15.0 Waste Management. [Reserved]
16.0 Reporting.
16.1 Field Test Reports.
Field test
reports shall be submitted to the Agency according to applicable regulatory
requirements. Field test reports should, at a minimum, include the following
elements.
16.1.1 Description of the source.
This should
include the name and location of the test site, descriptions of the process
tested, a description of the combustion source, an accurate diagram of stack or
duct cross-sectional area at the test site showing the dimensions of the stack
or duct, the location of the test ports, and traverse point locations and
identification numbers or codes. It should also include a description and
diagram of the stack or duct layout, showing the distance of the test location
from the nearest upstream and downstream disturbances and all structural
elements (including breachings, baffles, fans, straighteners, etc.) affecting
the flow pattern. If the source and test location descriptions have been
previously submitted to the Agency in a document (e.g., a monitoring plan or
test plan), referencing the document in lieu of including this information in
the field test report is acceptable.
16.1.2 Field test procedures.
These should
include a description of test equipment and test procedures. Testing
conventions, such as traverse point numbering and measurement sequence (e.g.,
sampling from center to wall, or wall to center), should be clearly stated.
Test port identification and directional reference for each test port should be
included on the appropriate field test data sheets.
16.1.3 Field test data.
16.1.3.1
Summary of results. This summary should include the dates and times of testing,
and the average near-axial gas velocity and the average flue gas volumetric
flow results for each run and tested condition.
16.1.3.2 Test
data. The following values for each traverse point should be recorded and
reported:
(a)
Differential pressure at traverse point i (Delta Pi)
(b) Stack or
duct temperature at traverse point i (ts(i))
(c) Absolute
stack or duct temperature at traverse point i (Ts(i))
(d) Yaw angle
at traverse point i (0y(i))
(e) Stack gas
near-axial velocity at traverse point i (va(i))
16.1.3.3 The
following values should be reported once per run:
(a) Water vapor
in the gas stream (from Method 4 or alternative), proportion by volume (Bws),
measured at the frequency specified in the applicable regulation
(b) Molecular
weight of stack or duct gas, dry basis (Md)
(c) Molecular
weight of stack or duct gas, wet basis (Ms)
(d) Stack or
duct static pressure (Pg)
(e) Absolute
stack or duct pressure (Ps)
(f) Carbon
dioxide concentration in the flue gas, dry basis (%d CO2)
(g) Oxygen
concentration in the flue gas, dry basis (%d O2)
(h) Average
near-axial stack or duct gas velocity (va(avg)) across all traverse points
(i) Gas
volumetric flow rate corrected to standard conditions, dry or wet basis as
required by the applicable regulation (Qsd or Qsw)
16.1.3.4 The
following should be reported once per complete set of test runs:
(a)
Cross-sectional area of stack or duct at the test location (A)
(b) Pitot tube
calibration coefficient (Cp)
(c)
Measurement system response time (sec)
(d) Barometric
pressure at measurement site (Pbar)
16.1.4 Calibration data.
The field test
report should include calibration data for all probes and test equipment used
in the field test. At a minimum, the probe calibration data reported to the
Agency should include the following:
(a) Date of
calibration
(b) Probe type
(c) Probe
identification number(s) or code(s)
(d) Probe
inspection sheets
(e) Pressure
measurements and calculations used to obtain calibration coefficients in
accordance with section 10.6 of this method
(f)
Description and diagram of wind tunnel used for the calibration, including dimensions
of cross-sectional area and position and size of the test section
(g)
Documentation of wind tunnel qualification tests performed in accordance with
section 10.1 of this method
16.1.5 Quality assurance.
Specific
quality assurance and quality control procedures used during the test should be
described.
17.0 Bibliography.
(1) 40 CFR
Part 60, Appendix A, Method 1 - Sample and velocity traverses for stationary
sources.
(2) 40 CFR Part
60, Appendix A, Method 2 - Determination of stack gas velocity and volumetric
flow rate (Type S pitot tube) .
(3) 40 CFR
Part 60, Appendix A, Method 2F - Determination of stack gas velocity and
volumetric flow rate with three-dimensional probes.
(4) 40 CFR
Part 60, Appendix A, Method 2H - Determination of stack gas velocity taking
into account velocity decay near the stack wall.
(5) 40 CFR
Part 60, Appendix A, Method 3 - Gas analysis for carbon dioxide, oxygen, excess
air, and dry molecular weight.
(6) 40 CFR
Part 60, Appendix A, Method 3A - Determination of oxygen and carbon dioxide
concentrations in emissions from stationary sources (instrumental analyzer
procedure).
(7) 40 CFR
Part 60, Appendix A, Method 4 - Determination of moisture content in stack
gases.
(8) Emission
Measurement Center (EMC) Approved Alternative Method (ALT-011) ‘‘Alternative Method 2 Thermocouple
Calibration Procedure.’’
(9) Electric
Power Research Institute, Interim Report EPRI TR-106698, ‘‘Flue Gas Flow Rate
Measurement Errors,’’ June 1996.
(10) Electric
Power Research Institute, Final Report EPRI TR-108110, ‘‘Evaluation of Heat
Rate Discrepancy from Continuous Emission Monitoring Systems,’’ August 1997.
(11) Fossil
Energy Research Corporation, Final Report, ‘‘Velocity Probe Tests in Nonaxial
Flow Fields,’’ November 1998, Prepared for the U.S. Environmental Protection
Agency.
(12) Fossil
Energy Research Corporation, ‘‘Additional Swirl Tunnel Tests: E-DAT and T-DAT
Probes,’’ February 24, 1999, Technical Memorandum Prepared for U.S.
Environmental Protection Agency, P.O. No. 7W-1193-NALX.
(13)
Massachusetts Institute of Technology, Report WBWT-TR-1317, ‘‘Calibration of
Eight Wind Speed Probes Over a Reynolds Number Range of 46,000 to 725,000 Per
Foot, Text and Summary Plots,’’ Plus appendices, October 15, 1998, Prepared for
The Cadmus Group, Inc.
(14) National
Institute of Standards and Technology, Special Publication 250, ‘‘NIST
Calibration Services Users Guide 1991,’’ Revised October 1991, U.S. Department
of Commerce, p. 2.
(15) National
Institute of Standards and Technology, 1998, ‘‘Report of Special Test of Air
Speed Instrumentation, Four Prandtl Probes, Four S-Type Probes, Four French
Probes, Four Modified Kiel Probes,’’ Prepared for the U.S. Environmental
Protection Agency under IAG #DW13938432-01-0.
(16) National
Institute of Standards and Technology, 1998, ‘‘Report of Special Test of Air
Speed Instrumentation, Five Autoprobes,’’ Prepared for the U.S. Environmental
Protection Agency under IAG #DW13938432-01-0.
(17) National
Institute of Standards and Technology, 1998, ‘‘Report of Special Test of Air
Speed Instrumentation, Eight Spherical Probes,’’ Prepared for the U.S.
Environmental Protection Agency under IAG #DW13938432-01-0.
(18) National
Institute of Standards and Technology, 1998, ‘‘Report of Special Test of Air
Speed Instrumentation, Four DAT Probes, ‘‘ Prepared for the U.S. Environmental
Protection Agency under IAG #DW13938432-01-0.
(19) Norfleet,
S.K., ‘‘An Evaluation of Wall Effects on Stack Flow Velocities and Related Overestimation
Bias in EPA’s Stack Flow Reference Methods,’’ EPRI CEMS User’s Group Meeting,
New Orleans, Louisiana, May 13-15, 1998.
(20) Page,
J.J., E.A. Potts, and R.T. Shigehara, ‘‘3-D Pitot Tube Calibration Study,’’ EPA
Contract No. 68D10009, Work Assignment No. I-121, March 11, 1993.
(21)
Shigehara, R.T., W.F. Todd, and W.S. Smith, ‘‘Significance of Errors in Stack
Sampling Measurements,’’ Presented at the Annual Meeting of the Air Pollution
Control Association, St. Louis, Missouri, June 1419, 1970.
(22) The
Cadmus Group, Inc., May 1999, ‘‘EPA Flow Reference Method Testing and Analysis:
Findings Report,’’ EPA/430-R-99-009.
(23) The
Cadmus Group, Inc., 1998, ‘‘EPA Flow Reference Method Testing and Analysis:
Data Report, Texas Utilities, DeCordova Steam Electric Station, Volume I: Test
Description and Appendix A (Data Distribution Package),’’ EPA/430-R-98-015a.
(24) The
Cadmus Group, Inc., 1998, ‘‘EPA Flow Reference Method Testing and Analysis:
Data Report, Texas Utilities, Lake Hubbard Steam Electric Station, Volume I:
Test Description and Appendix A (Data Distribution Package),’’
EPA/430-R-98-017a.
(25) The
Cadmus Group, Inc., 1998, ‘‘EPA Flow Reference Method Testing and Analysis:
Data Report, Pennsylvania Electric Co., G.P.U. Genco Homer City Station: Unit
1, Volume I: Test Description and Appendix A (Data Distribution Package),’’
EPA/430-R-98-018a.
(26) The
Cadmus Group, Inc., 1997, ‘‘EPA Flow Reference Method Testing and Analysis:
Wind Tunnel Experimental Results,’’ EPA/430-R-97-013.
18.0 Annexes
Annex A, C,
and D describe recommended procedures for meeting certain provisions in
sections 8.3, 10.4, and 10.5 of this method.
Annex B
describes procedures to be followed when using the protractor wheel and pointer
assembly to measure yaw angles, as provided under section 8.9.1.
18.1 Annex A - Rotational Position Check.
The following
are recommended procedures that may be used to satisfy the rotational position
check requirements of section 8.3 of this method and to determine the
angle-measuring device rotational offset (RADO).
18.1.1 Rotational position check with probe outside stack.
Where physical
constraints at the sampling location allow full assembly of the probe outside
the stack and insertion into the test port, the following procedures should be
performed before the start of testing. Two angle-measuring devices that meet
the specifications in section 6.2.1 or 6.2.3 are required for the rotational
position check. An angle-measuring device whose position can be independently
adjusted (e.g., by means of a set screw) after being locked into position on
the probe sheath shall not be used for this check unless the independent
adjustment is set so that the device performs exactly like a device without the
capability for independent adjustment. That is, when aligned on the probe such
a device must give the same reading as a device that does not have the
capability of being independently adjusted. With the fully assembled probe
(including probe shaft extensions, if any) secured in a horizontal position, affix
one yaw angle-measuring device to the probe sheath and lock it into position on
the reference scribe line specified in section 6.1.5.1. Position the second
angle-measuring device using the procedure in section 18.1.1.1 or 18.1.1.2.
18.1.1.1
Marking procedure. The procedures in this section should be performed at each
location on the fully assembled probe where the yaw angle-measuring device will
be mounted during the velocity traverse. Place the second yaw angle-measuring
device on the main probe sheath (or extension) at the position where a yaw
angle will be measured during the velocity traverse. Adjust the position of the
second angle-measuring device until it indicates the same angle (±1°) as the
reference device, and affix the second device to the probe sheath (or
extension). Record the angles indicated by the two angle-measuring devices on a
form similar to Table 2G-2. In this position, the second angle-measuring device
is considered to be properly positioned for yaw angle measurement. Make a mark,
no wider than 1.6 mm (1⁄16 in.), on the probe sheath (or extension), such that
the yaw angle-measuring device can be re-affixed at this same properly aligned
position during the velocity traverse.
18.1.1.2
Procedure for probe extensions with scribe lines. If, during a velocity
traverse the angle-measuring device will be affixed to a probe extension having
a scribe line as specified in section 6.1.5.2, the following procedure may be
used to align the extension’s scribe line with the reference scribe line instead
of marking the extension as described in section 18.1.1.1. Attach the probe
extension to the main probe. Align and lock the second angle-measuring device
on the probe extension’s scribe line. Then, rotate the extension until both
measuring devices indicate the same angle (±1°). Lock the extension at this
rotational position. Record the angles indicated by the two angle-measuring
devices on a form similar to Table 2G-2. An angle-measuring device may be
aligned at any position on this scribe line during the velocity traverse, if
the scribe line meets the alignment specification in section 6.1.5.3.
18.1.1.3
Post-test rotational position check. If the fully assembled probe includes one
or more extensions, the following check should be performed immediately after
the completion of a velocity traverse. At the discretion of the tester,
additional checks may be conducted after completion of testing at any sample
port. Without altering the alignment of any of the components of the probe
assembly used in the velocity traverse, secure the fully assembled probe in a
horizontal position. Affix an angle-measuring device at the reference scribe
line specified in section 6.1.5.1. Use the other angle-measuring device to
check the angle at each location where the device was checked prior to testing.
Record the readings from the two angle-measuring devices.
18.1.2 Rotational position check with probe in stack.
This section
applies only to probes that, due to physical constraints, cannot be inserted
into the test port as fully assembled with all necessary extensions needed to
reach the inner-most traverse point(s).
18.1.2.1
Perform the out-of-stack procedure in section 18.1.1 on the main probe and any
attached extensions that will be initially inserted into the test port.
18.1.2.2 Use
the following procedures to perform additional rotational position check(s)
with the probe in the stack, each time a probe extension is added. Two
angle-measuring devices are required. The first of these is the device that was
used to measure yaw angles at the preceding traverse point, left in its
properly aligned measurement position. The second angle-measuring device is
positioned on the added probe extension. Use the applicable procedures in
section 18.1.1.1 or 18.1.1.2 to align, adjust, lock, and mark (if necessary)
the position of the second angle-measuring device to within ±1° of the first
device. Record the readings of the two devices on a form similar to Table 2G-2.
18.1.2.3 The
procedure in section 18.1.2.2 should be performed at the first port where
measurements are taken. The procedure should be repeated each time a probe
extension is re-attached at a subsequent port, unless the probe extensions are
designed to be locked into a mechanically fixed rotational position (e.g.,
through use of interlocking grooves), which can be reproduced from port to port
as specified in section 8.3.5.2.
18.2 Annex B - Angle Measurement Protocol for Protractor Wheel and Pointer Device.
The following
procedure shall be used when a protractor wheel and pointer assembly, such as
the one described in section 6.2.2 and illustrated in Figure 2G-5 is used to
measure the yaw angle of flow. With each move to a new traverse point, unlock,
re-align, and re-lock the probe, angle-pointer collar, and protractor wheel to
each other. At each such move, particular attention is required to ensure that
the scribe line on the angle pointer collar is either aligned with the
reference scribe line on the main probe sheath or is at the rotational offset
position established under section 8.3.1. The procedure consists of the
following steps:
18.2.1 Affix a
protractor wheel to the entry port for the test probe in the stack or duct.
18.2.2 Orient
the protractor wheel so that the 0° mark corresponds to the longitudinal axis of
the stack or duct. For stacks, vertical ducts, or ports on the side of
horizontal ducts, use a digital inclinometer meeting the specifications in
section 6.2.1 to locate the 0° orientation. For ports on the top or bottom of
horizontal ducts, identify the longitudinal axis at each test port and
permanently mark the duct to indicate the 0° orientation. Once the protractor
wheel is properly aligned, lock it into position on the test port.
18.2.3 Move
the pointer assembly along the probe sheath to the position needed to take
measurements at the first traverse point. Align the scribe line on the pointer
collar with the reference scribe line or at the rotational offset position
established under section 8.3.1. Maintaining this rotational alignment, lock
the pointer device onto the probe sheath. Insert the probe into the entry port
to the depth needed to take measurements at the first traverse point.
18.2.4 Perform
the yaw angle determination as specified in sections 8.9.3 and 8.9.4 and record
the angle as shown by the pointer on the protractor wheel. Then, take velocity
pressure and temperature measurements in accordance with the procedure in
section 8.9.5. Perform the alignment check described in section 8.9.6.
18.2.5 After
taking velocity pressure measurements at that traverse point, unlock the probe
from the collar and slide the probe through the collar to the depth needed to
reach the next traverse point.
18.2.6 Align
the scribe line on the pointer collar with the reference scribe line on the
main probe or at the rotational offset position established under section
8.3.1. Lock the collar onto the probe.
18.2.7 Repeat
the steps in sections 18.2.4 through 18.2.6 at the remaining traverse points
accessed from the current stack or duct entry port.
18.2.8 After
completing the measurement at the last traverse point accessed from a port,
verify that the orientation of the protractor wheel on the test port has not
changed over the course of the traverse at that port. For stacks, vertical
ducts, or ports on the side of horizontal ducts, use a digital inclinometer
meeting the specifications in section 6.2.1 to check the rotational position of
the 0° mark on the protractor wheel. For ports on the top or bottom of
horizontal ducts, observe the alignment of the angle wheel 0° mark relative to
the permanent 0° mark on the duct at that test port. If these observed
comparisons exceed ±2° of 0°, all angle and pressure measurements taken at that
port since the protractor wheel was last locked into position on the port shall
be repeated.
18.2.9 Move to
the next stack or duct entry port and repeat the steps in sections 18.2.1
through 18.2.8.
18.3 Annex C - Guideline for Reference Scribe Line Placement.
Use of the
following guideline is recommended to satisfy the requirements of section 10.4
of this method. The rotational position of the reference scribe line should be
either 90° or 180° from the probe’s impact pressure port. For Type-S probes,
place separate scribe lines, on opposite sides of the probe sheath, if both the
A and B sides of the pitot tube are to be used for yaw angle measurements.
18.4 Annex D - Determination of Reference Scribe Line Rotational Offset.
The following
procedures are recommended for determining the magnitude and sign of a probe’s
reference scribe line rotational offset, RSLO. Separate procedures
are provided for
two types of
angle-measuring devices: digital inclinometers and protractor wheel and pointer
assemblies.
18.4.1 Perform
the following procedures on the main probe with all devices that will be
attached to the main probe in the field [such as thermocouples, resistance
temperature detectors (RTDs), or sampling nozzles] that may affect the flow
around the probe head. Probe shaft extensions that do not affect flow around
the probe head need not be attached during calibration.
18.4.2 The
procedures below assume that the wind tunnel duct used for probe calibration is
horizontal and that the flow in the calibration wind tunnel is axial as
determined by the axial flow verification check described in section 10.1.2.
Angle-measuring devices are assumed to display angles in alternating 0° to 90°
and 90° to 0° intervals. If angle-measuring devices with other readout
conventions are used or if other calibration wind tunnel duct configurations
are used, make the appropriate calculational corrections. For Type-S probes,
calibrate the A-side and B-sides separately, using the appropriate scribe line
(see section 18.3, above), if both the A and B sides of the pitot tube are to
be used for yaw angle determinations.
18.4.2.1
Position the angle-measuring device in accordance with one of the following
procedures.
18.4.2.1.1 If
using a digital inclinometer, affix the calibrated digital inclinometer to the probe.
If the digital inclinometer can be independently adjusted after being locked
into position on the probe sheath (e.g., by means of a set screw), the
independent adjustment must be set so that the device performs exactly like a
device without the capability for independent adjustment. That is, when aligned
on the probe the device must give the same readings as a device that does not
have the capability of being independently adjusted. Either align it directly
on the reference scribe line or on a mark aligned with the scribe line
determined according to the procedures in section 18.1.1.1. Maintaining this
rotational alignment, lock the digital inclinometer onto the probe sheath.
18.4.2.1.2 If
using a protractor wheel and pointer device, orient the protractor wheel on the
test port so that the ° mark is aligned with the longitudinal axis of the wind
tunnel duct. Maintaining this alignment, lock the wheel into place on the wind
tunnel test port. Align the scribe line on the pointer collar with the reference
scribe line or with a mark aligned with the reference scribe line, as
determined under section 18.1.1.1. Maintaining this rotational alignment, lock
the pointer device onto the probe sheath.
18.4.2.2 Zero
the pressure-measuring device used for yaw nulling.
18.4.2.3
Insert the probe assembly into the wind tunnel through the entry port,
positioning the probe’s impact port at the calibration location. Check the
responsiveness of the pressure-measuring device to probe rotation, taking
corrective action if the response is unacceptable.
18.4.2.4
Ensure that the probe is in a horizontal position using a carpenter’s level.
18.4.2.5
Rotate the probe either clockwise or counterclockwise until a yaw null [zero
Delta P for a Type S probe or zero (P2-P3) for a 3-D probe] is obtained. If
using a Type S probe with an attached thermocouple, the direction of the probe
rotation shall be such that the thermocouple is located downstream of the probe
pressure ports at the yaw-null position.
18.4.2.6 Read
and record the value of 0null, the angle indicated by the
angle-measuring device at the yaw-null position. Record the angle reading on a
form similar to Table 2G-6. Do not associate an algebraic sign with this
reading.
18.4.2.7
Determine the magnitude and algebraic sign of the reference scribe line
rotational offset, RSLO. The magnitude of RSLO will be
equal to either 0null or (90°–0null), depending on the type of
probe being calibrated and the type of angle-measuring device used. (See Table
2G-7 for a summary.) The algebraic sign of RSLO will either be
positive if the rotational position of the reference scribe line is clockwise
or negative if counterclockwise with respect to the probe’s yaw-null position.
Figure 2G-10 illustrates how the magnitude and sign of RSLO are determined.
18.4.2.8
Perform the steps in sections 18.3.2.3 through 18.3.2.7 twice at each of the
two calibration velocities selected for the probe under section 10.6. Record
the values of RSLO in a form similar to Table 2G-6.
18.4.2.9 The
average of all RSLO values is the reference scribe line rotational offset for
the probe.